I have not used my APM2.5 for sometime, and have managed to get it to initialise following my last post:
http://diydrones.com/forum/topics/apm-2-5-initializing?xg_source=activity
But now I am having compass issues (I have edited this post because I thought I had all sorts of other issues but have managed to work through those one by one and am now stuck on the last hurdle!).
The board I am using is an APM2.5, I have cut the jumper trace between the two pads (indicated in green circle), and have checked using the continuity function of my multimeter that there is no longer signal passing across.
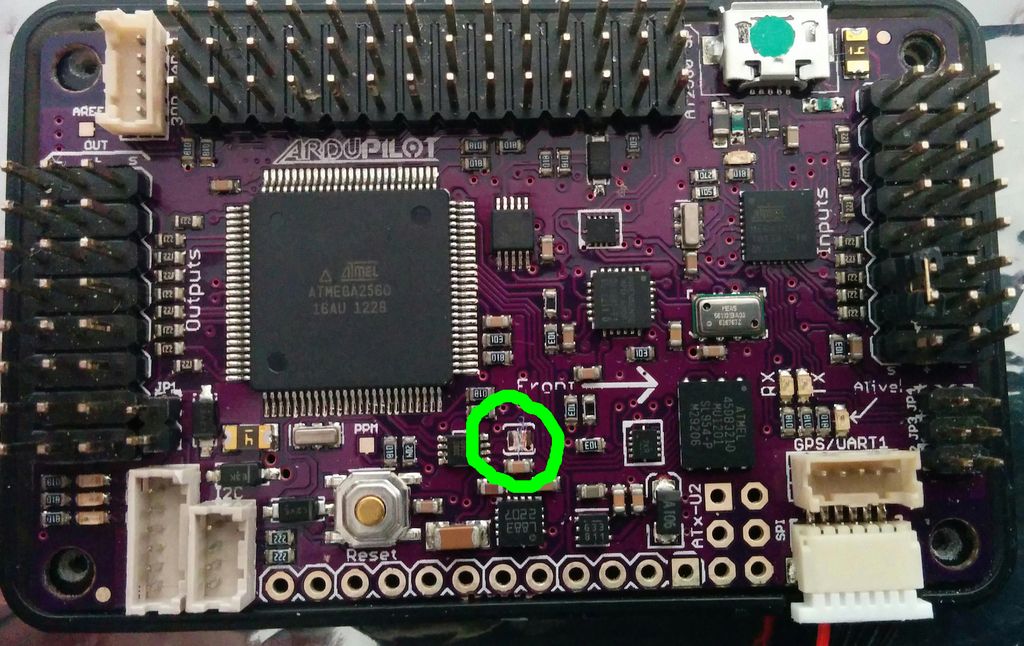
However, when i power up the APM2.5, and connect in Mission Planner, the heading still moves as I rotate the board... I thought cutting that jumper trace would disable that?
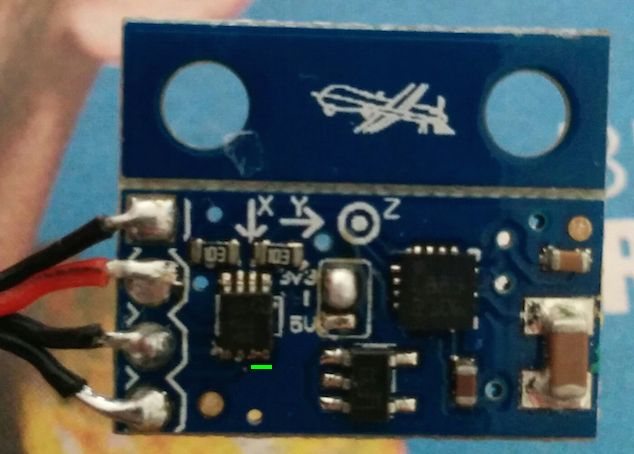
I have checked the wiring is correct and the voltage to the external magnetometer is 2.8/9v and the 3.3V pads have been soldered, yet when I manoeuvre the external compass, the heading does not change.
External compass option has been enabled in the code (using the full parameter list).
Interestingly, it seems as though the two legs of the chip (indicated by green line) are bridged with solder... Could that be an issue?
I plan to mount the compass in a way so that there is no adjustment needed in the code to make it as simple as possible.
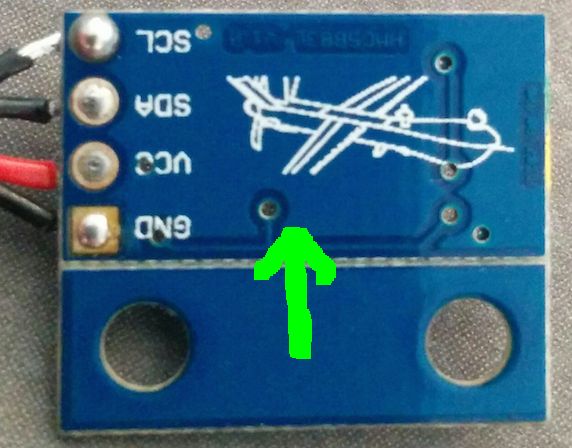
Let me know if this is the wrong way (green arrow points to nose of aircraft).
Replies
I had to relocate the mag away from the GPS, everything is now working and calibrated - time to fly!
Since cutting the trace to the internal mag I did a reinstall of the latest Mission Planner and I could upgrade to plane FW3.3 and now I can calibrate the compass!
Oh the relief!
I thought I had cut the trace properly ages ago but clearly not, and the reinstall of MP helped.
Now to put it back into the Bixler 2 and get flying!
Using Terminal, I can test the compass.
Without the external compass connected, it fails - this indicates the internal compass is no longer accessible.
When I plug in the external compass and redo the test, it initializes and I can see it is enabled, and when it starts the gyro's I can see the offsets change as I move the compass around - which indicates it is all working fine. Yay!
I will try and use a previous version of Mission Planner and see if that resolves my issue.
I am still confused as to how moving the APM by itself changes the heading while the external is stationary... Is that because it is using the gyro's to predict heading?
I edited this post to try to pinpoint my external compass issues...
I have left it plugged into a battery for a while now, with the model sitting in the window so the gps can hopefully see some satellites, but it still gives Bad GPS Health.
The airspeed sensor fluctuates from 1.5 - 2.5 m/s, the hud still fluctuates mildy even though the plane is lying still, my Bat. voltage reading is not settling, it can't seem to make up its mind whether its 12.45 or 12.49 of a volt, my altitude changes constantly around 30cms...
So weird to see all of the instruments going crazy. I don't recall seeing them all like this before.
@Sandy,
You might want to try and reset the full parameter list to the default parameters.
First, save your existing full parameter list to a safe location where you can reload it after doing the full parameter list reset to default parameters.
Do the reset to default parameters and reboot.
Then reload you original existing full parameter list and see if that helps with your issue.
Regards,
TCIII AVD
Yep, nothing changes except I am now able to use the CLI and test the individual sensors, and they all seem to check out :)
So... Now I am wondering if the position of my mag is too close to the GPS?
I printed a 3d case that has space for the mag underneath the gps, about 5mm of clearance between the two... I have the original Lea6H and seperate mag board.
GPS is facing up towards the sky. Will maybe have to drag this out into the field to check the "Bad GPS Health". Hopefully it has bad health because it can't see any satellites from inside.
As for calibrating the mag, I am seeing some whopping offsets like I have never seen before - from 900 to 4000!
Will maybe have to find a new home for the mag, away from the GPS :/
Good news, the GPS is functioning just fine, but my Magnetometer is not.
And mission planner will not calibrate it. I will try rolling back to a previous version of mission planner, Maybe the latest doesn't like FW prior to 3.xx plane. Im grasping at straws on that one.
When I try to calibrate, the spinning axis with white dots freezes and says:
Compass 1: Error 99
Compass 2: Error 99
I have cut the trace to the onboard mag and have the mag connected via I2C... Will check the wiring tomorrow but all the wires beeped out on my pre install inspection.
So I don't know why it thinks I have two mags attached, or is it saying it can't find either?
I also need to change the mag orientation - it thinks forward is backwards lol, at least that is an easy fix...
Hi Thomas, Thanks for following from the other thread.
Doing a reset to default doesn't help unfortunately.
It would be really useful to see what is going on in the CLI with the sensors but I think that has been disabled?
I am struggling to get a compass calibration done, after I have collected a bunch of points, it moves them far away from the rotating axis.
I'll move further back in the arduplane FW and see if anything changes.
It seems most of them go away after a while, the hud moves slightly after I pick it up and put it back down on the bench but maybe thats normal? I am not in gps range (inside an apartment) so will see how it goes at the field next flying day.
My compass has some pretty far out offsets, that can't be right - I will redo it with a battery in and over radio and see what happens.