Since we made Erle-Brain we’ve got a lot of feedback on what’s most used and useful for users. With this in mind we are happy to announce we have released a new version of our brain: Erle-Brain 2, a more powerful unit, smaller, faster and cheaper brain for building robots and drones.
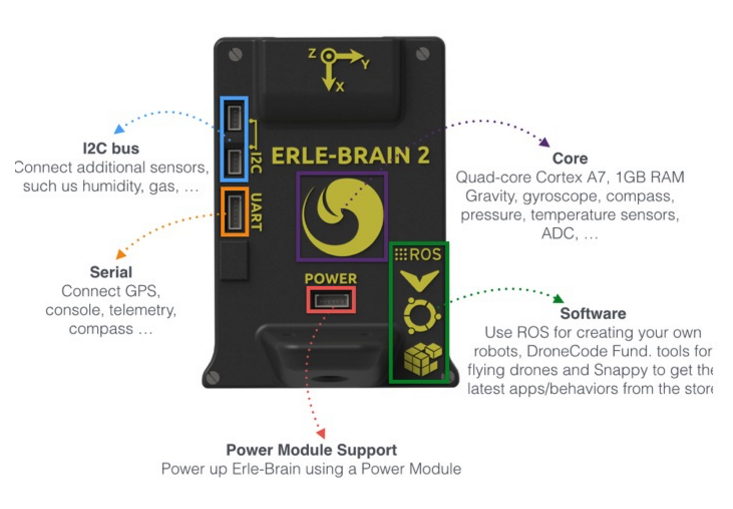
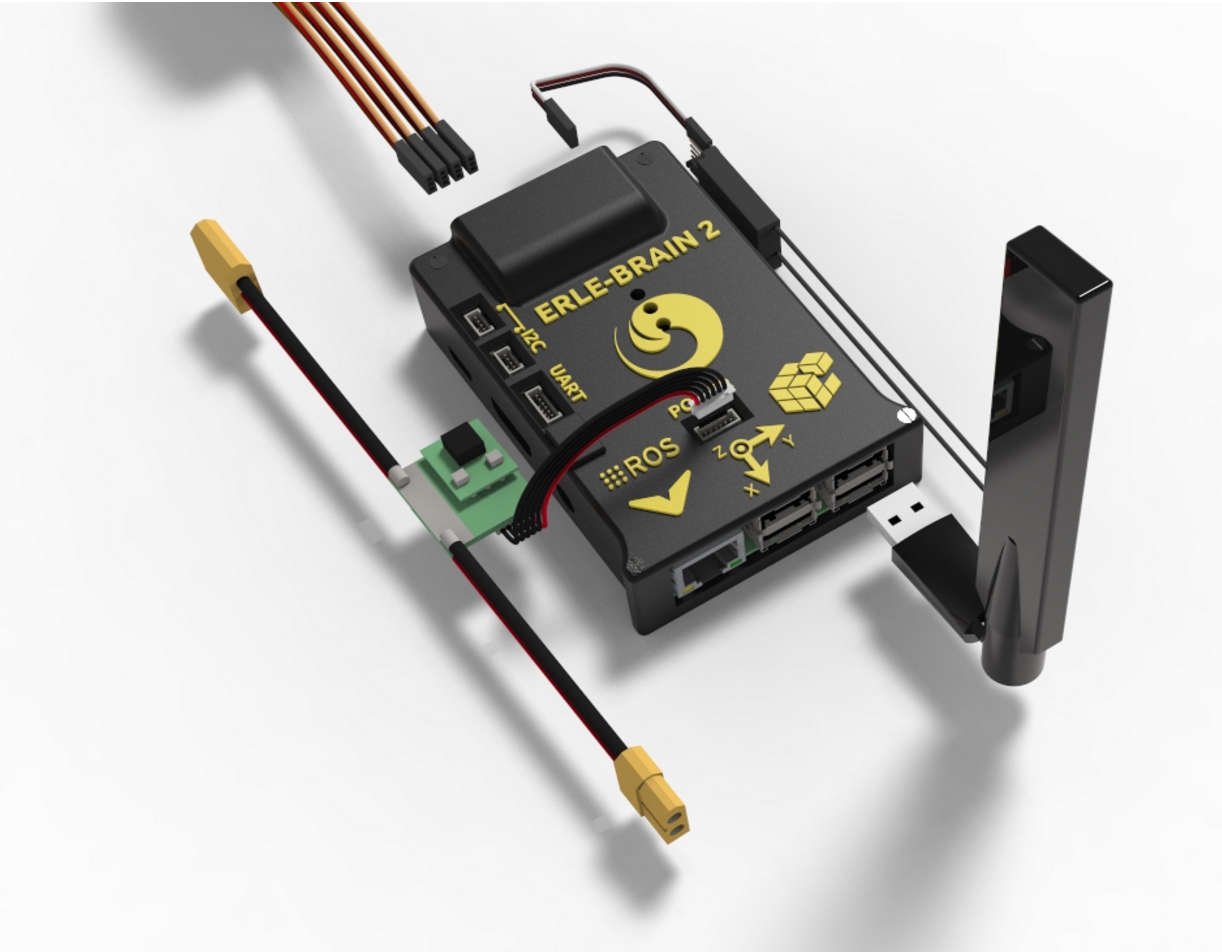
Erle-Brain 2 ships with a cost of €199, includes a quad-core Cortex-A7 with all the sensors needed to create copters, rovers, planes or even hexapods. It includes integrated optional 1080 HD 5MP camera, Wi-Fi, Bluetooth, 3G/4G networks, USB, Ethernet, I2C, HDMI and UART.
The weight of the whole system is 100g and the size is a bit smaller than his predecessor with 96 x 70 x 25mm.

Some specifications regarding the sensors included:
Accelerometers: MEMS digital-output triple-axis accelerometer with a full scale range of ±8g (or alternatively ±16g) and integrated 16-bit ADCs
Magnetometers: MEMS triple-axes 16 bit (15μT/LSB) with a full scale measurement range is ±4800μT
Gyroscopes: MEMS triple-axes with a full-scale range of ±1000 (or alternatively ±2000) °/sec and integrated 16-bit ADCs
Barometers: digital pressure sensor with 10 cm resolution
For those of you interested. Erle-Brain 2 has been built on top of the Raspberry Pi 2. This decision has been made mainly due to its popularity and existing support for this board already. We are looking forward to collaborate with other existing options based on this exact same board
Comments
Georacer ,
,
@Patrick
You're totally right on explanation of Pixhawk Fire Cape. That's not really something similar to Pixhawk with cpu stm32f4, which has the ability to run the whole flight stack on it. But, as you told me, Pixhawk Fire Cape really can't. Thanks.
Plus, I'm now reading your project posted on ErleRobotics Forum[4]. That's really amazing. I like it a lot.
[4] http://forum.erlerobotics.com/t/erle-brain-uav-project/197
@Victor @Patrick
As far as I can know, Erle-Brain 2 actually is exactly an more integrated solution for drone development, when compared to Erle-Brain including two parts: BBB and Pixhawk Fire Cape, with more features.
Samuel,
You may conclude that the Fire Cape is a flight controler, but in fact it is a board with sensors and signal conditionning and it has no software on it, so it cannot be used as a standalone unit.
Erle-Brain 2 is a RaspberryPi2 wit a sensor shield, so the processor is a Broadcom BCM2836 (quad-core A7 + VideoCore IV GPU) SOC but we generaly consider the CPU and GPU as seperate unit while we configure and program. Just like the BBB, the sensors and signal conditionning chips are installed on a board and accessed through the RPI2 GPIOs. So basically it is almost the same architecture. (Victor correct me if I'm wrong...) You can see progress on my project on ErleRobotics Forum.
@Patrick
Thank you for your explanation. That's very helpful. So, now we can come to a conclusion, which is Erle-Brain consists of two parts, BBB and Pixhawk Fire Cape (PFC) where BBB for artificial intelligence and multimedia and some of flight control while PFC for flight control.
But, it seems that Erle-Brain 2 [3] consists of SoC (System-on-Chips) only, compatible with Raspberry Pi 2, which take the full responsibility for flight control and artificial intelligence and multimedia. So, What opinions about that product, Erle-Brain 2?
And also, that project you're now developing looks that interesting. You know, I would like to know more about it. So, is there a link to it out there?
[3] http://erlerobotics.com/docs/Artificial_Brains/Erle-Brain_2/Intro.html
The cape is a mezzanine type of board on wich the differents sensors and voltage converters - 3.3 to 5 volts to interface the servos with PWM- are installed. These devices communicate with the BBB using the different interfaces; GPIO, I2C, SPI, UART. The Ardupilot is compiled for Arm based processor and runs on a shell or as a service on the BBB. So the intelligence is on the BBB and the interface is on the cape. The autopilot software usage is about 20% of available processing power on the BBB, allowing complementary task like videostreaming, data acquisition, auxiliary systems control and on board fly planning for example.
I am running my BBB with the Firehawk on an ArduPlane configuration with mjpeg streamer and pan-tilt camera unit controled by USB joystick connected to my laptop. Uplink-Downlink with 5.8 ghz WIFI and standard 2.4 Ghz backup system using EX9 flashed radio control.
I do not necessary agree with all the concepts that Erle is putting forward; SNAPPY being the supreme example, but I must admit that Victor and his team have allways been of great help for most of my questions or requests, and that is priceless.
@Victor
Actually, according to the official doc[2], it seems to include two parts, BBB and Pixhawk Fire Cape. Please correct me if i'm wrong. Thanks.
[2] http://erlerobotics.com/docs/Artificial_Brains/Erle-Brain/Intro.html
Samuel,
Erle-Brain is not based on the PixHawk. The embedded Linux box itself is the Flight Control Unit (FCU). Erle-Brain 2 is the evolution of Erle-Brain and based in the Raspberry Pi 2.
Feel free to read more about it at http://erlerobotics.com/docs/Artificial_Brains/Erle-Brain_2/Intro.html.
@George @Victor
As far as I can know, Erle-Brain is a drone platform based on Pixhawk and BBB, where Pixhawk is responsible for flight, while BBB for advanced applications. Let's say, vision processing. After it, however, Erle starts providing a single, integrated solution for drone development, as shown around here, which is built around Raspberry Pi 2 without something similar to Pixhawk taking control of flight in the air. But, which parts of Erle Brain 2 take responsibility for flighting?
And also, before Erle-Brain 2, there was an integrated platform[1] for Drones from Qualcomm, which is called Snapdragon Flight Reference Platform. As per information in the link above, that platform is also an integrated solution for drone development, consisting of Snapdragon 801 processor with quad core CPU with frequency up to 2.5 GHz as well as DSP with frequency up to 800 MHz, where quad-core CPU for advanced applications while DSP for flighting.
[1] https://www.qualcomm.com/news/snapdragon/2015/09/10/first-public-de...
Victor,
Like I said, I didn't throw our Erle-Brains away! I just put them in a drawer.
I'm willing to take your proposal and try getting help on your forum once again, to make our autopilots work for our planes. Who knows, something might have changed since the last time.
I'll give it a go when I get the time.
All the best,
George
Not sure if it's the language barrier or what but i did not request your opinion on how to make an autopilot Georacer. I've politely tried to understand your issues with our technology, particularly the File System and offered commitment to solve them.
We've got hundreds of customers that are using our brains as their development platforms in robotics and works for them every single time. Our team works hard to push the barrier and offer our customers access to new alternatives for commercial models. That was the Snappy case which we still plan to support while maintaining (as it's always been) our Debian images.
You still believe that Pixhawk+Odroid works is better? That's a topic well discussed before. As a roboticist and thinking about the kind of applications and complexity that I'd like my robots to face I'm confident that a Linux integrated solution delivers much more.
-
1
-
2
-
3
of 3 Next