Hi everyone,
As I promised, I've made a video to show the result of new flight control board.
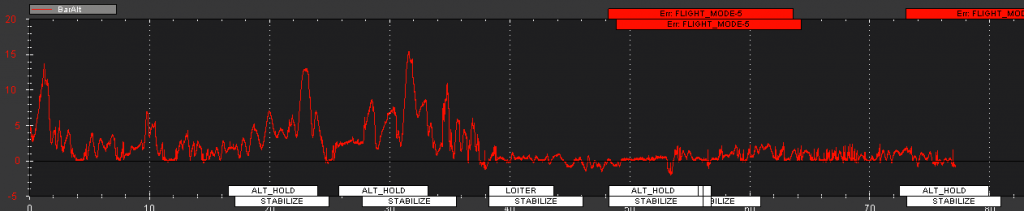
Log data
Gyro&accel (fluctuate around -1 and 1)

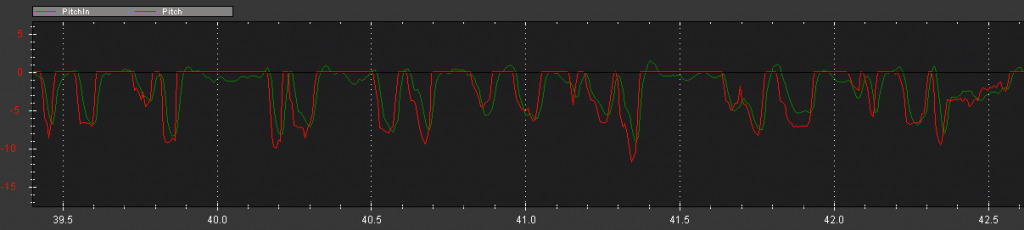
Closer look:



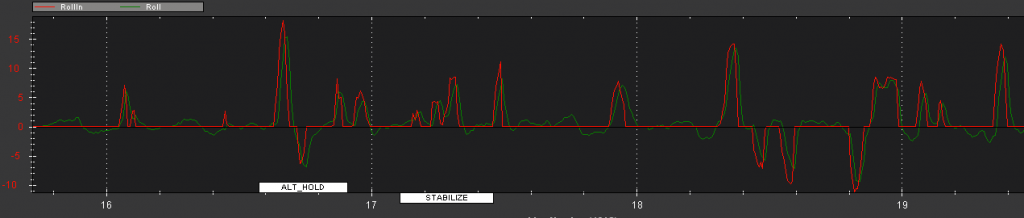
Roll, pitch (maybe my quad goes to one direction only :3)
Can anybody tell my why I get a error in flight mode?
My quad

(see my previous post for more details)
Comments
Nice flying Thanh. Keep it up. :)
Hope to see your new vid with the new props.
I hate photobucket >.<
Hi Gary,
I broken my APC 10x4.7, so I decided to replace by two 10x4.5 :D but quad still flied ^^ I've just received new prop and landing gear.
Thanks you for your advise!
Hi Thanh,
I think it is not such a good idea to use props that differ in any way, in pitch or diameter on the same copter.
Although the APM code can probably make some allowance for that, it is optimized to treat all motors / props the same, so it could induce hunting or out of balance behavior.
And it will force them to turn at slightly different RPM which may account for some of excess noise.
My guess is you will like 11" props better if you can find them.
12" props seem to be too big for Flamewheel, especially clones of DJI frame, 11's work very well though.
Gary McCray: thanks you! I'll try it soon. In the video, I use 2 10x4.5 propellers and 2 10x4.7 propellers, maybe it causes that problem :D until now, I realize that 5500mA is too big and not necessary, the combination of many 3s-4s is better than one 5500mA :3 I will try some test on tomorrow.
So sorry :D I need some adjust ^^ It's public right now
Video says it's "Private" for me?
Hi Thanh,
Flight looks good, Accels are great actually - no problem there.
But there are definitely a couple issues which could make a difference.
As you said in your previous post your props are really awful (you can tell by the sound among other things).
The first thing I did was look at your picture to see if they were on upside down (they weren't).
I really recommend trying to get some good 11 x 4.7's on there, I am using GemFan carbon filled 11x4.7 on my DJI F450 Flamewheel and they work great (will make less than half the noise of yours while flying() and are very smooth and the battery lasts longer.
Your T-motors can handle them with no trouble too.
I won't say the battery is too big, but it is awfuly big and it would hover at lower throttle with a 3000 - 4000mah battery.
But the props will probably make a more important imptrovement in any case.
The carbon filled (not carbon fiber) Gemfan propellers are very inexpensive and are stiffer and stronger than ordinary plastic ones and will not cut you to ribbons like carbon fiber ones.
Flight controller looks like it is working great.
Best Regards,
Gary