


The Syma brand copters have been more stable than anything else their size, probably owing to high mass, low loading propellers.
The fuselage can be flipped over, making a flat surface.
The original battery holder wouldn't fit in this arrangement. Another rearrangement of electronics got the original battery holder to fit.


The downward tail fins give it a bit of an MQ-1 look. The tail fins do nothing, of course.
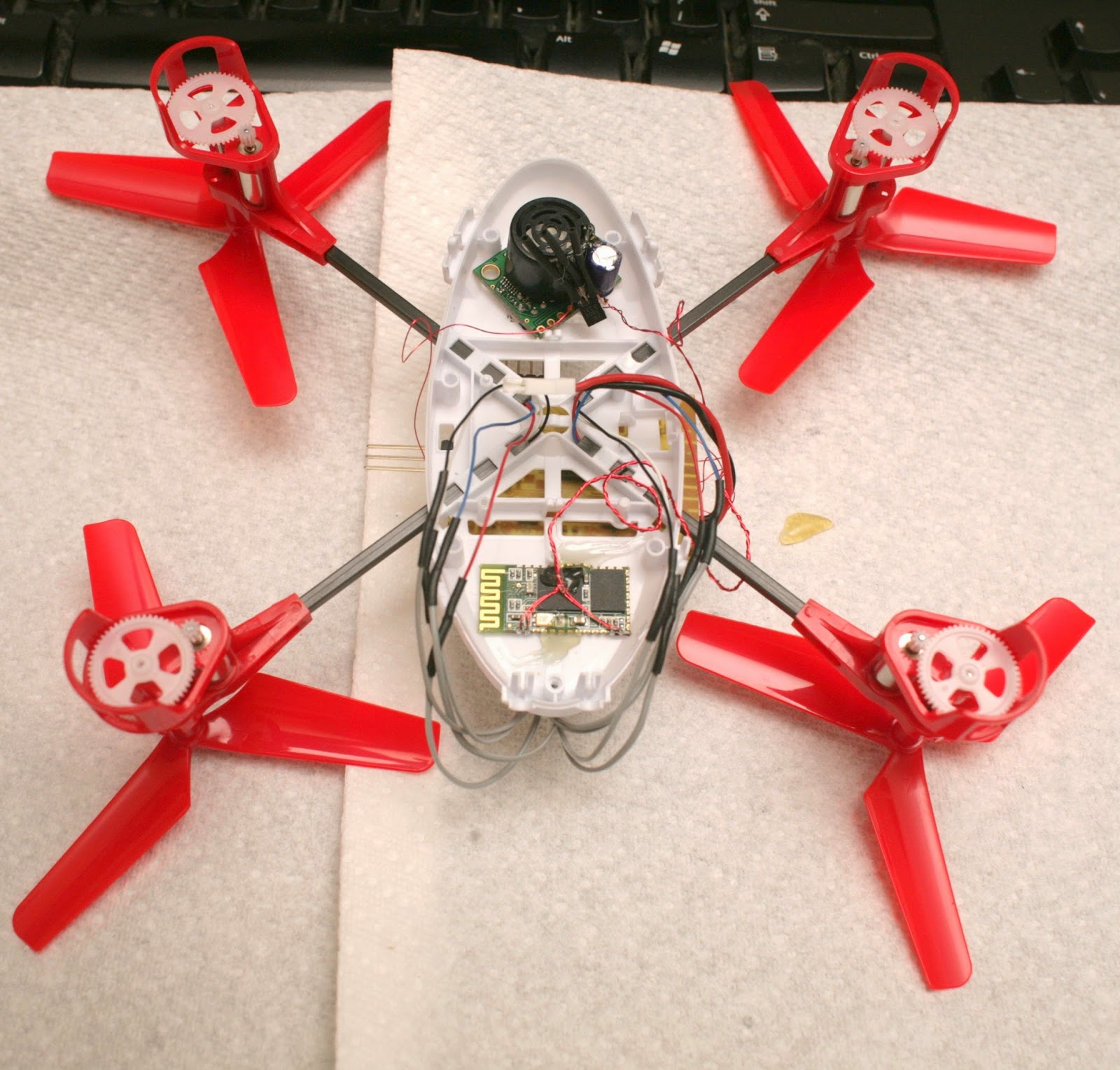
Sonar was totally non functional with any motor power, but functional with the motors off. It didn't work on regulated 3.3V or unregulated 4.2V. The Syma X1's had the same sonar module working, but they're gone. A 500mAh had the same voltage drop & sonar failure.
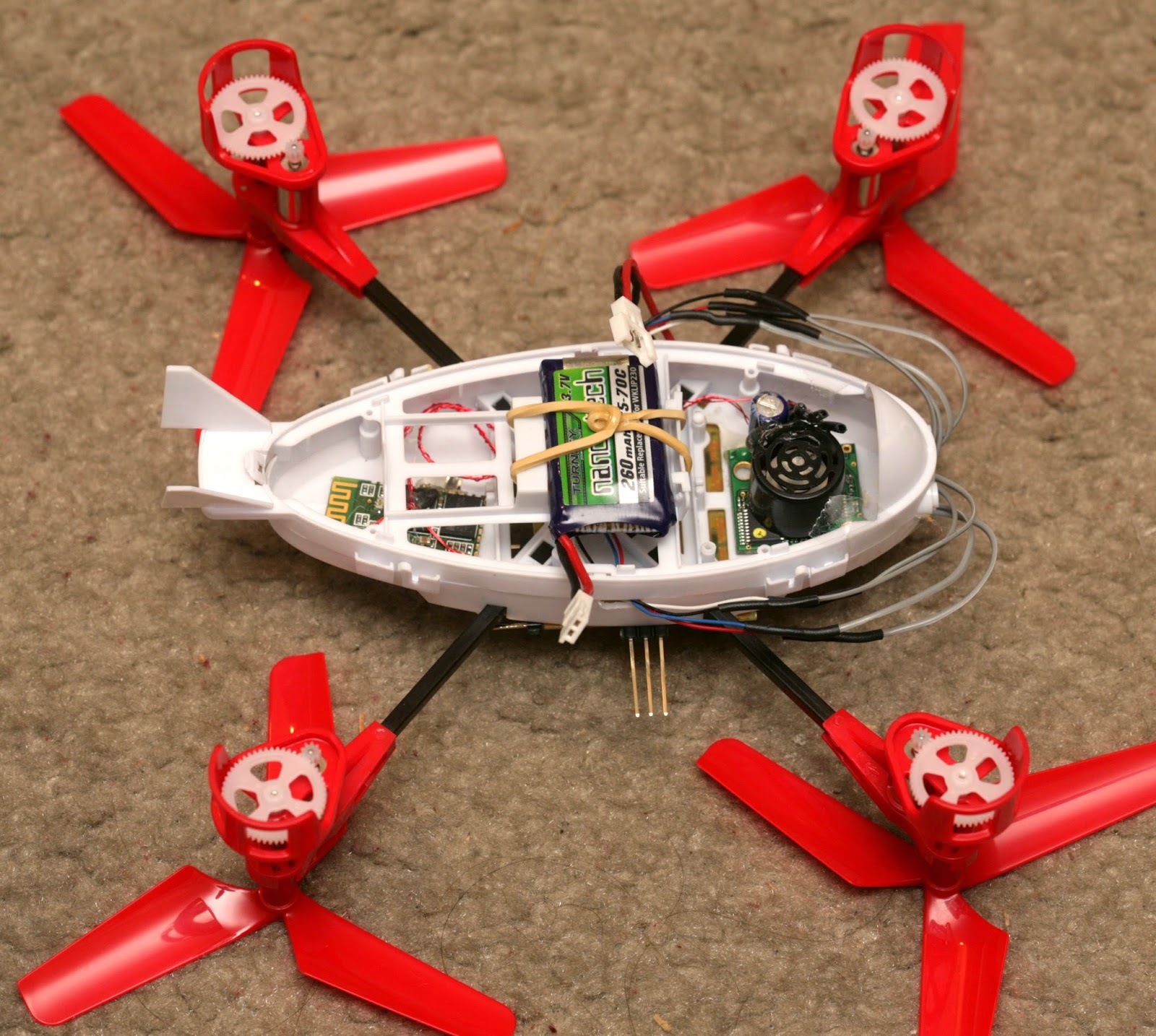
The tried & true rubber band allows a 260mAh to fit. The 260mAh gets it off the ground, but is pulled down to 3.4V. It flies for 2 minutes.
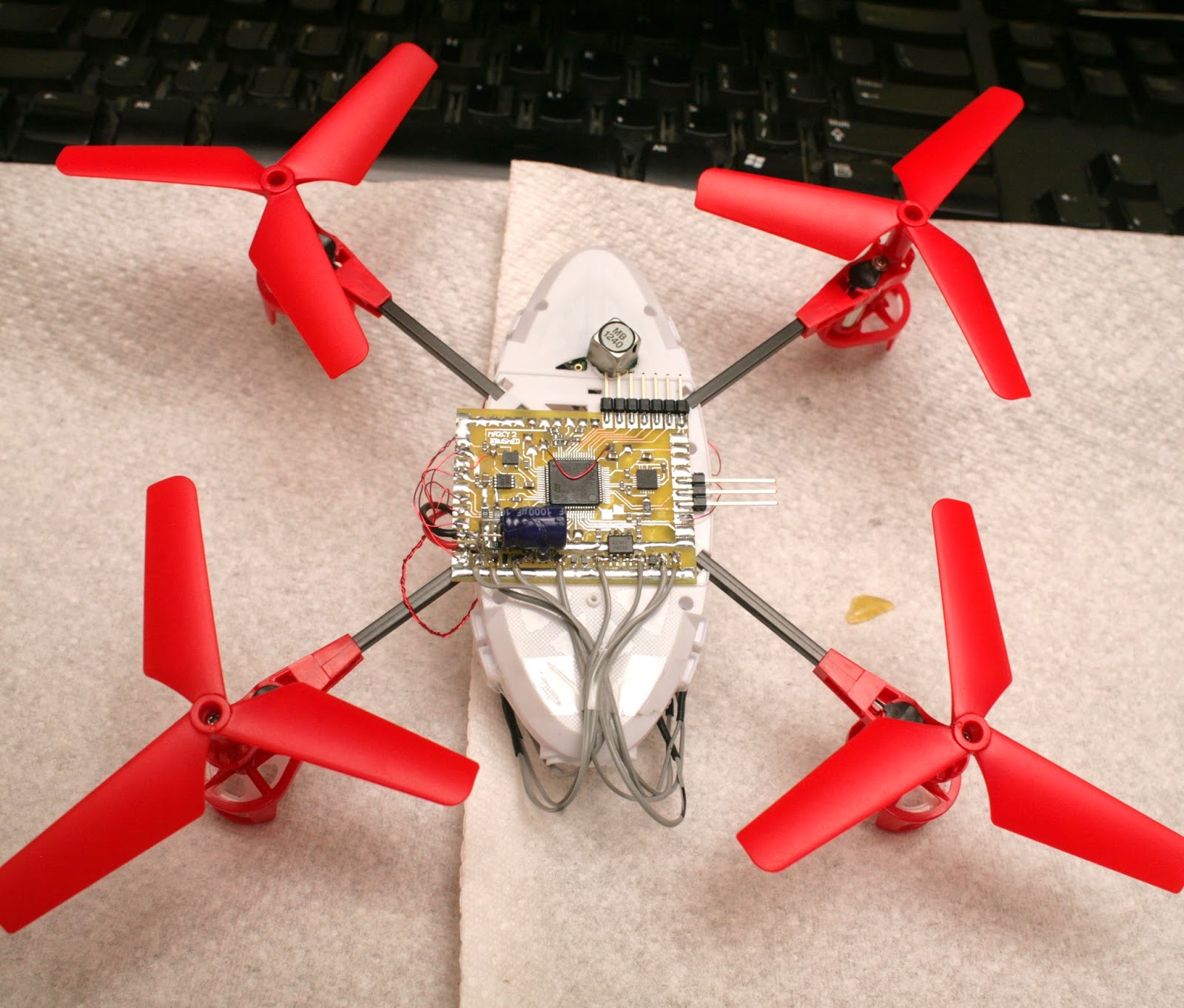
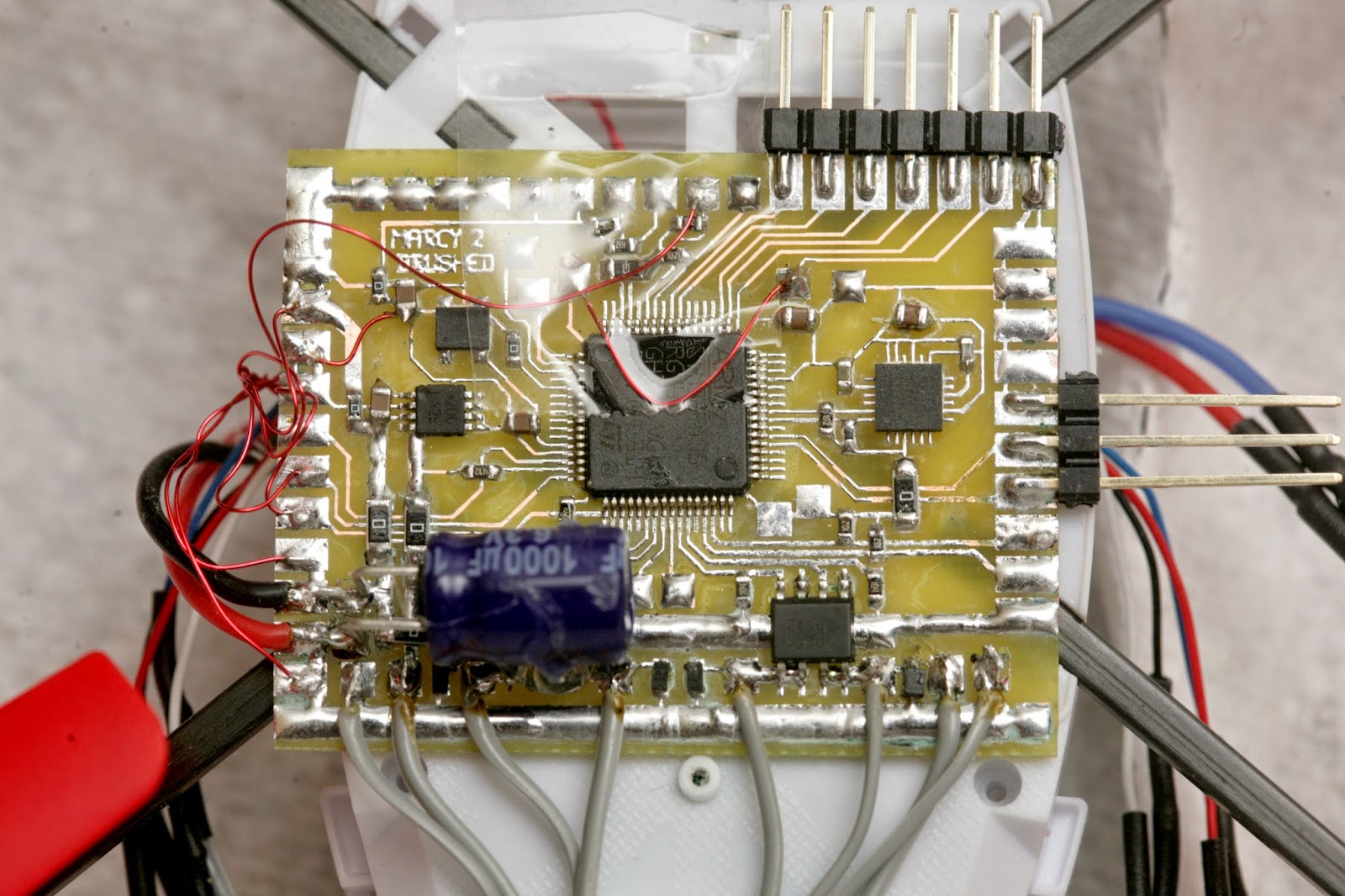
The IMU goes at 1400Hz with only 6 axes being read. The PWM goes at 1200Hz. The IMU is more stable than on the turnigy microquad. At least it's now possible to upload a new configuration file without power cycling it. That was a tricky reset bit, years in the making.

So the motor wires had to be routed away from the sonar transformer. There aren't many places for those wires. With that out of the way, the Syma X3 worked perfectly. It was very stable, performing the autonomous open loop maneuvers exactly as hoped.
Without any position sensing besides altitude, it took several takes to get a maneuver to work. It was more successful in the packed apartment than the large room. The apartment might break up the air currents more. 1 key seems to be making it as light as possible.
The IMU goes at 1400Hz with only 6 axes being read. The PWM goes at 1200Hz. The IMU is more stable than on the turnigy microquad. At least it's now possible to upload a new configuration file without power cycling it. That was a tricky reset bit, years in the making.
So the motor wires had to be routed away from the sonar transformer. There aren't many places for those wires. With that out of the way, the Syma X3 worked perfectly. It was very stable, performing the autonomous open loop maneuvers exactly as hoped.
Without any position sensing besides altitude, it took several takes to get a maneuver to work. It was more successful in the packed apartment than the large room. The apartment might break up the air currents more. 1 key seems to be making it as light as possible.
Open loop autopilot is how all the commercial quads do flips. It's how the early academic quads did aerobatics. They just repeatedly flew a fixed set of stick inputs & delays until the maneuver came out. There might be room for some tweeking to try to keep it inside a box, but the maneuver is flown without any position knowledge. The Vicon system might have improved enough that open loop flying is no longer necessary in academia.
Miniaturization beyond a point still costs you. There is a weight advantage to using $5 of ceramic caps instead of $0.35 of electrolytic.
Ceramic 100uF 6.3v * 5: 0.3g
Electrolytic 470uF 6.3v: 0.6g
But the weight of the soldering for the ceramics would make them heavier. Digikey has a 220uF 6.3 for $1.65. 2 of those would be lighter than the electrolytic.
What about using 2 batteries + regulator instead of a boost converter to get 5V 300mA?
Extra 4.2V 260mAh: >7.5g
boost converter: 3.1g
So all the work designing the boost converter was worth it. The choice in motor wire makes a difference, too.
Ribbon cable: 1.2g
wrapping wire: 0.1g
Didn't notice any reduction in power from using wrapping wire.
Comments
I agree :) But if i have more voltage i prefer to find more efficient motors :) So i have more lift .. you don't know if exist replace of standard 3.7 voltage with 7.4 ?
best
Roberto
Don't set the PWM higher than 50%.
Ho Jack ,
the dc motor accept only 1s battery or support also 2S battery ? On my test i see that if you use more 3.0 volt to motor after 2 minutes the motor fail ... i'm searching valid option that support until 7v .. someone have idea wher i can found it ?
best
Roberto