Good Afternoon (I've copied/pasted this from the Ardupilot forums to try and cast a larger net)
I'll start by saying the versions of everything I am running are shown below:![]()
I come to these forums to ask for some help with some MAV commands that I am using for a project. The short version is: I am attempting to send a X-UAV Mini Talon up to altitude (nothing too high, maybe 1kft for now) on a balloon, disconnect the drone, and have it return to the launch point without any user interaction after pressing 'arm'. The issue I am facing is in the balloon stage. Specifically, having the drone do nothing until height 'X'.
I've been searching through the documentation in the wikis on Ardupilot, these forums, and any random google result that seems like it would help for about a week and have yet to find any similar questions being asked.
I have some C and C++ experience, but not an extreme amount. So looking through the code and other forums I've managed to find mentions to an 'IDLE' mode and a MAV command named: MAV_CMD_NAV_ALTITUDE_WAIT, and associated do_altitude_wait command. (see pictures)


These are specifically mentioned in comments as being for balloon launches and I have seen posts about other teams using them successfully. The question I ask is how do I access these commands/functions? The drop down boxes in mission planner does not have the options available (see pictures below) and as such I assume that I need to do some work in the code to either enable these as options in mission planner or write the waypoint/mission file in a text editor instead.
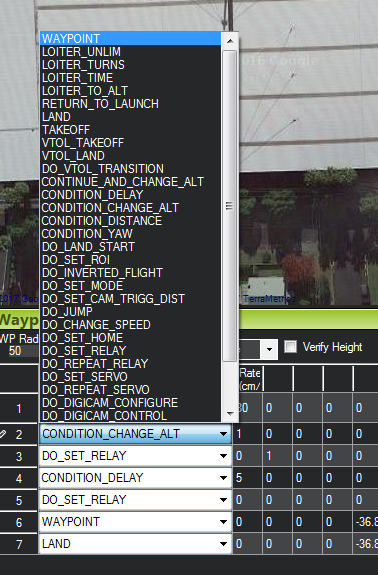

A work around I have been attempting to use is the CONDITION_CHANGE_ALT command, coupled with SET_SERVO to turn motors on/off at various point but that comes with its own issues with failing to upload the WP throwing "Upload wps failed CONDITION_CHANGE_ALT MAV_MISSION_UNSUPPORTED"
Avoiding setting the mission this way would be preferable anyway.
If anyone has any helpful hints, or can point me to someone that has done this type of mission before I would appreciate it. Thank you advance for your time. I'll in New Zealand (GMT +12) time and will be around for most of the work week to answer any further questions.
Replies
I ended up setting a random function for that waypoint, then opening the txt file and manually coding the function in. If I opened it again in mission planner it still functioned as I wanted it to when I uploaded the file into the drone.
Bit of an annoying workaround, but it worked. Hope that helps.
Could you solve the problem for MAV_CMD_NAV_ALTITUDE_WAIT?