This is what I've done to my Dagu Rover 5!
As it comes out of the box.
 I was shipped the 4 motor version.
I was shipped the 4 motor version.
I live out here in the "boonies", so I get to talk to guys that use and maintain earth moving equipment.
There is even a guy that restores old tractors, stationary engines and such.
Talking with them was great, they all said powering a track at BOTH ends was a total waste of time and power.
Most people who get one of these say the tracks are a pain.
The 'dozer mechanic, who is ex-army and worked on tanks, told me that I could expect the thing to "throw" tracks due to
- no road wheels
- being powered at both ends of the track
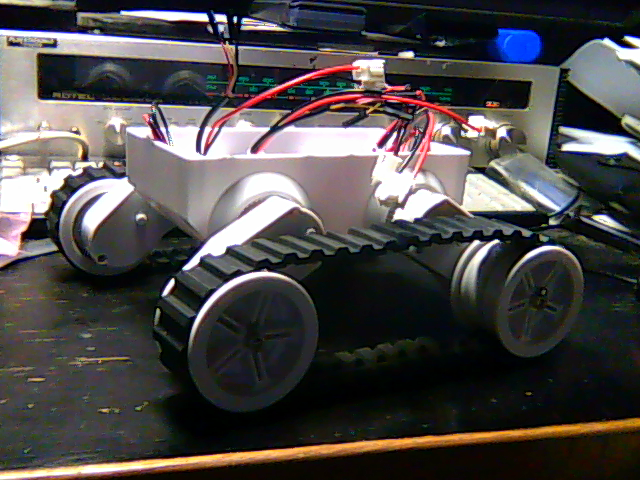
So I went with the Dagu Wild Thumper wheels, 120mm in diameter.
Straight up it draws less current, that might be due to more mechanical advantage of a larger diameter wheel.
One thing that I don't get is most guys just wedge an Arduino etc and a few batteries in the chassis and call it "done".
Well that's just not good enough!!
I want mine to be a lot more robust.
The other thing is if you have off road wheels, the damn thing should be able to cope with dirt, dust and a bit of water!
So I set about building some chassis mods.





The Controller is a genuine Arduino Mega, with Sparkfun XBee, GPS and Monster Motor Shields.
I have a DFRobot prototyping shield with an LSM303 tilt compensated compass sitting on top of the stack.
The XBee is a Series 1, 60mW XBee Pro with the U.FL to RPSMA conector.
My controller is either another genuine Mega with Sparkfun GPS and Joystick shield or you can use an XBee USB Explorer on a computer.
The steering either way looks like a numeric keypad for steering, with "z","x","c","v" setting the throttle level.
My video link is a digital 2.4Ghz security camera, which has a low-ish frame rate, but plays nice with the 2.4Ghz Xbee.
I have a pair of 900Mhz XBee Pro's for when I go to an analogue video link.
Here is some video showing the onboard equipment and some "on patrol" video.
https://www.youtube.com/watch?v=43zqBtQyBF0