I recently wrote a little post designed to help those coming from a drone background pass the Fundamentals of Surveying exam, which I believe is an essential step to actually getting value out of drone data. Let me know what you think. Agree?
http://www.ddmckinnon.com/2017/06/20/becoming-land-surveyor-trainin...
When I joined 3DR two and a half years ago, I had a very broad mandate: define the product that will shepherd us from selling low-margin consumer electronics to high-margin enterprise tools. The figure Chris Anderson, my boss, published in Harvard Business Review several weeks ago, was nearly identical to the one I saw on my first day on the job. The mission was clear–go forth and get us to the green line.

At that point, it was not clear if the green line would be attained by hardware, software, services, or some innovative combination of all three. This uncertainty seems hard to believe in the summer of 2017, but it’s important to remember that the drone world has moved faster than any other in tech history. In January 2015, when I started at 3DR, DJI Phantom 2 Vision was struggling against the GoPro-carrying equivalent, Iris+ was a bleeding-edge RTF platform, and Parrot Bebop wowed the world with its solid-state stabilization. Drones were weird tech curiosities purchased over the internet, not consumer-grade toys that occupied entire aisles at Best Buy. To put this in perspective, iPhone 6 was released in September of 2014. If I handed a Mavic Pro user an Iris+, she would hardly recognize it as a drone. If I handed an iPhone 7 user and iPhone 6, she would feel right at home.
Digression aside, there were very few constraints applied to building 3DR’s first commercial product. Back then, a services team existed to build custom hardware for several enterprise clients, a handful of large companies were buying components for their own custom airframes, interest was swirling around selling a supported version of Arducopter, a handful of serious firms were using off-the-shelf Iris+s for mapping and inspection work, and we offered a joint mapping SKU with Pix4D. Through a rigorous customer development journey that was inspired by Four Steps to the Epiphany (.pdf link from Steve Blank’s course), I investigated nearly every vertical that could benefit from drone hardware, software, or services. I climbed cell towers, inspected hail-damaged roofs, descended into quarries, visited construction sites, and rode along with police. Much of this activity is covered in a podcast interview that I did with Ian Smith of Commercial Dron..., but the key takeaways were that 3DR could compete best in software, that software would eat most of the value in commercial drones, and that AEC (architecture, engineering, and construction) stood to gain the most from drone technology. After narrowing our focus, we set to work building Site Scan, a broadly focused product for mapping and monitoring construction sites.
The learning did not stop there. After shipping Site Scan, we continued to learn and iterate. While many personas across AEC benefit from drone data (an owner may want a progress update, a superintendent may want to understand how work was performed, a PM may want to know if adequate materials have arrived, and so on), introducing new data into an old industry is always problematic. For example, while a PE may love to use drone data to walk back through time to understand where the post-tension cables lie underneath a concrete slab, collecting and interpreting a new data stream represents a significant burden on his day-to-day activities. Through our continued rigorous customer development, we learned that civil engineers, earthworks, and design firms spend a significant amount of money commissioning terrestrial topographic surveys accurate to one-tenth of a foot. To generate this type of survey, a firm will send out a crew with a robotic total station or GPS rover and shoot a point at some specified grid interval (25 feet or 50 feet are typical). From the grid elevations, contours, cut/fill diagrams, earthworks designs, and earthworks bills are generated. A nice example shamefully stolen from some corner of the internet is shown below.
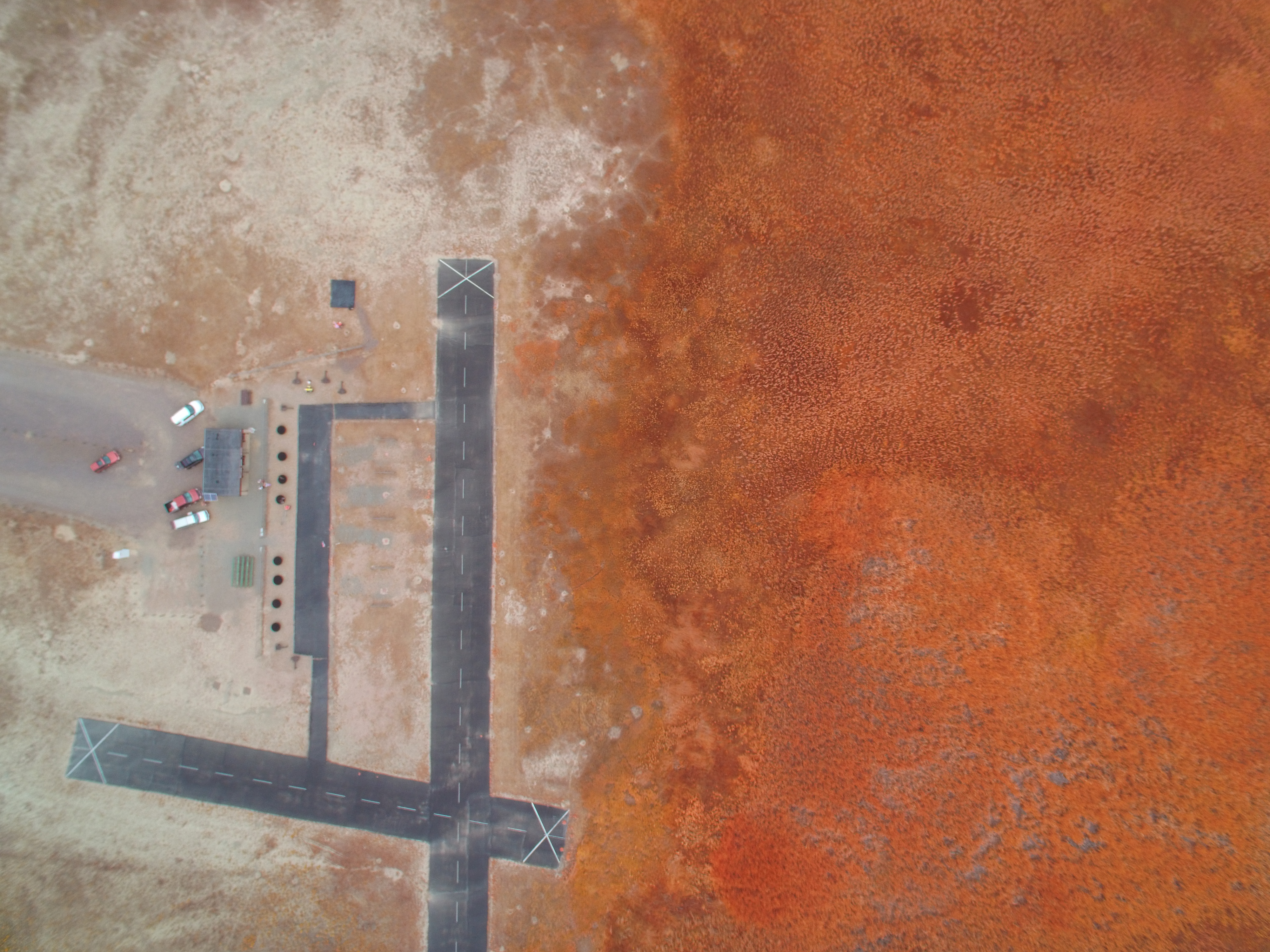
When analyzing these topographic surveys, we learned that the exact same data product could be generated 4-10x faster and cheaper with a drone. Unlike many of the other strong use-cases in AEC like progress monitoring, pre-bid site capture, stakeholder communication, and QA/QC, the drone data served as a direct replacement for something that our users were already doing. Instead of forcing two new behaviors (new way to capture and new data to interpret), users performing topographic surveys with drones only had to learn one (new way to capture). This led me to the conclusion that, while drones can do many, many things, autonomous drones are primarily a tool to decrease the cost and collection time of topographic surveys. For specifics, check out our case studies with Bogh Engineering and All-American Surveying.
As I begin to chew on this concept, I started bouncing ideas around with Christian Stallings, the UAS lead at McKim & Creed, a large engineering and geomatics firm. At McKim & Creed, they have used drones for everything from monitoring erosion on a sensitive beachto surveying an active landfill, but each use-case is fundamentally hinged upon topographic survey. Toward the end of our conversation, Christian said, “Dan, since you’re so interested in survey now, you should become a surveyor. If you know a little math it should be easy to pass the test.” As in engineering, surveying is governed by NCEES, the National Council of Examiners for Surveying and Engineering, and one must pass the Fundamentals of Surveying exam to become a Land Surveyor-in-Training. I had previously passed the Fundamentals of Engineering exam for my role at Exponent, so I had some familiarity with the NCEES and decided to take Christian’s off-hand comment as a challenge. Besides, as a huge disciple of the method acting school of product management, I knew that building for surveyors meant becoming a surveyor. The next day I registered for the FS exam.
And then I waited. And waited. I scheduled the exam for a month out, so I had plenty of time to study. Right? I bought George Cole’s Surveyor Reference Manual, Jan Van Sickle’s Surveying Solved Problems, and the official FS practice exam and printed out the reference manual provided during the exam. The weekend before I was scheduled to sit for the exam, I cracked Surveyor Reference Manual and began studying.
First off, I would strongly recommend against this approach. The FS exam is fairly challenging. It covers obscure geometry and trigonometry problems that you haven’t seen since high school, mainstream three-dimensional calculus that you haven’t seen since college, and esoteric property law that you likely have never seen if your background is not in survey. Fortunately, the Surveyor Reference Manual does a tremendous job covering each of the topics. Those coming from a survey or civil engineering background will likely have a totally different approach to studying, but those coming from technology who want to learn more about the industry could probably benefit from following my approach below.
To begin, I would recommend flipping through every section of the Surveyor Reference Manual to attain some rapid-fire familiarity with all of the topics.
Math
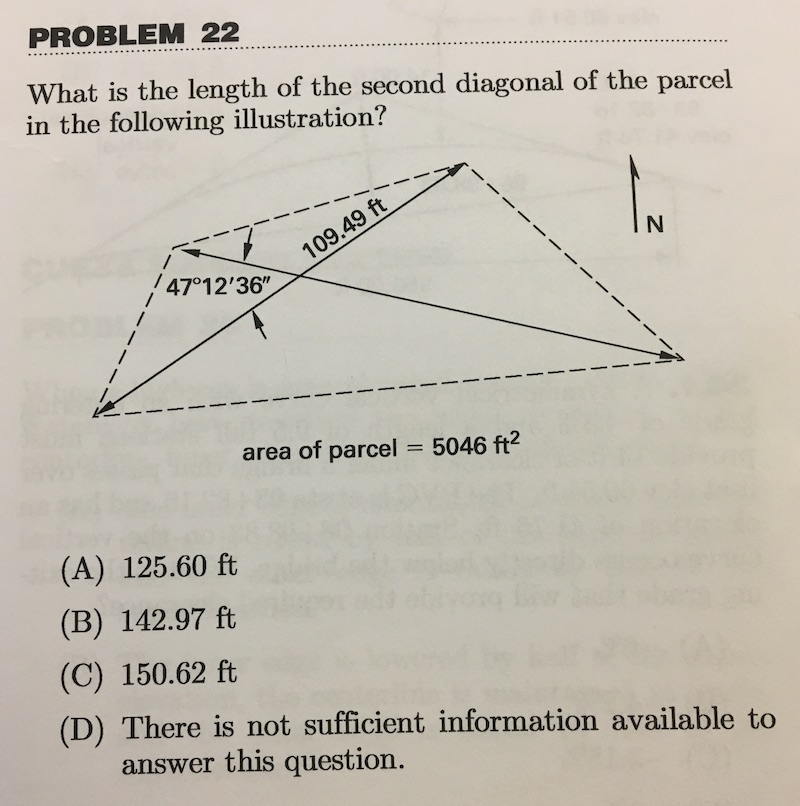
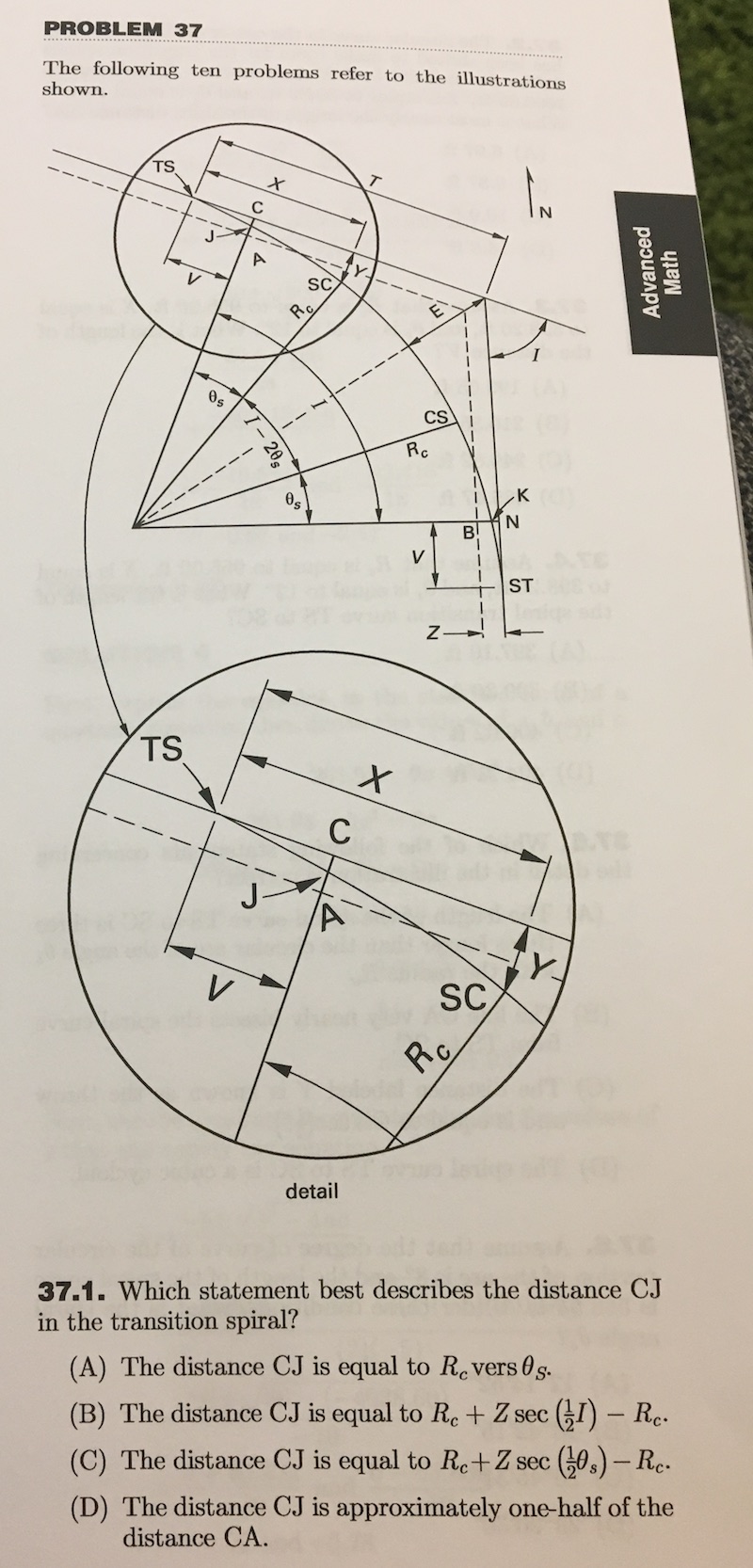
This guide is written for someone with a good math background, but minimal recent experience with geometry. It is critical to refamiliarize yourself with trigonometric and geometric identities for oblique triangles. A strong plurality of questions on the exam involve some kind of oblique triangle calculation and I am guessing you haven’t thought about the law of cosines for a decade. You must understand how to solve a triangle from an area and three angles, two angles and a side, and so on. Likewise, be comfortable solving a circle given a radius and a chord or two other pieces of information that entirely define the shape. The problems below show examples of both of these.
If you can nail these two concepts and briefly remind yourself how to calculate volumes of solid rotations, you will crush the math section. It is important to remember that many relevant formulas will be given in the reference manual. Keep the reference manual close when studying so you know what you do and don’t need to commit to memory.
Field Data Aquisition
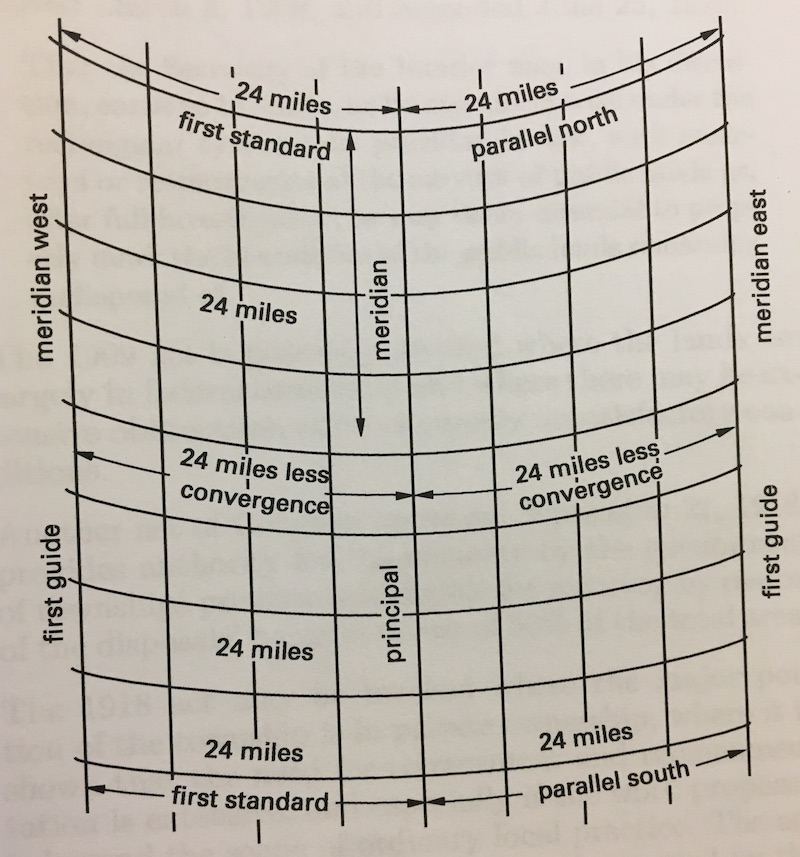
This part will be super unfamiliar but is critical for understanding how surveyors work today because so much of their behavior is rooted in history. Briefly, 66-foot Gunter’s chains and 100-foot tapes are still used as units of distance measurement (always remember that one acre is equal to ten square chains) and a dozen or so questions on pin counting, back-sighting, leveling, and compass survey will appear on the exam. Because these questions cover several centuries of technical survey history, my best recommendation is to pretend you are surveying with these archaic tools and try to understand the process rather than commit individual steps to memory. For example, when a question on marking pins arises, think about how you would use the pins rather than memorize how many pins will be left in each of the chainsman’s hands. Using this technique, I scored well on this section of the exam, despite spending minimal time studying.
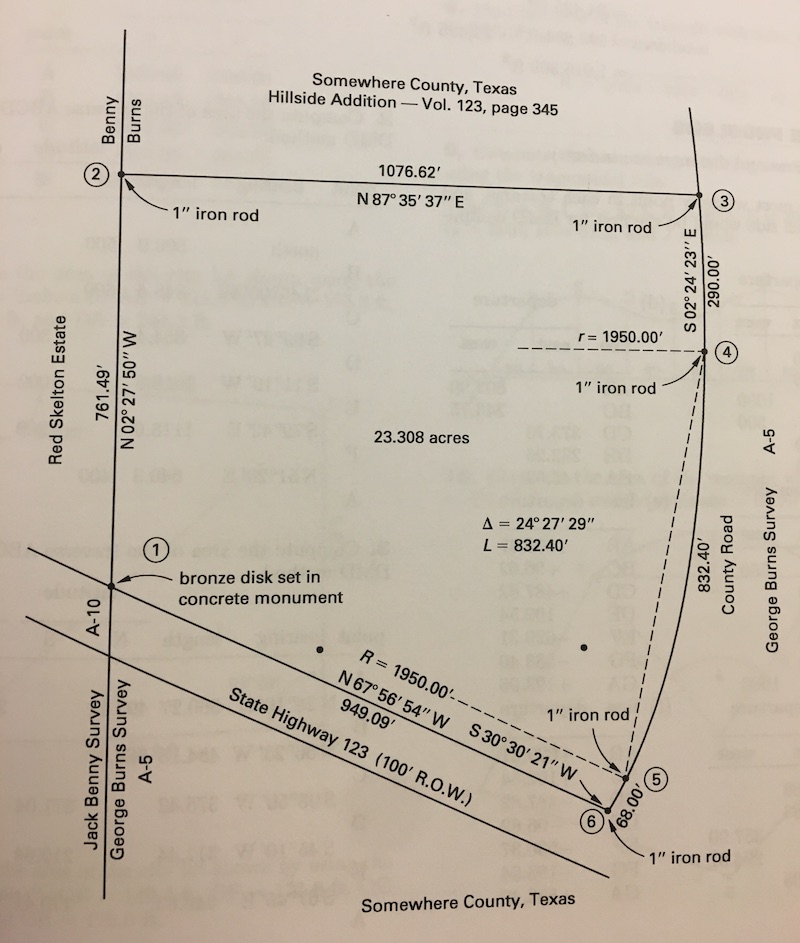
In addition, it is critical to remember that many of the concepts introduced in the section will apply to every section. The math problems are generally not straightforward math problems, but rather word problems that one must use survey understanding to translate descriptions into numbers. An infinite number of problems could be derived from the diagram above, but if you are not familiar with field data acquisition basics, it would be very difficult to solve any of them.
Plane Survey Calculations
This section simply combines the previous two. After a few hours of studying, you will likely be totally comfortable with the math, so try to spend time solving problems from this section that require you to set up the math problems using your knowledge of field data acquisition. When you get stuck (grrrrr… How do I calculate the central angle of an arc from a chord and two stations?), return to the previous section for help. A solid 40% of the exam could be traced back to this section, so you must get pretty comfortable with solving these–and fast. You have an average of 3 minutes to answer each question, so there is no time to derive relationships that are sometimes necessary to solve systems of oblique triangles. Try to commit the basic frameworks to memory.
Geodesy/Survey Astronomy
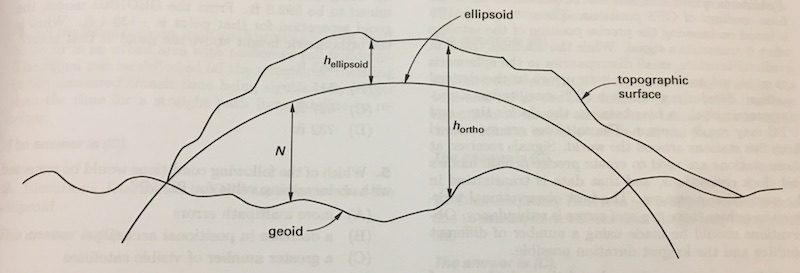
Finally an easy section! If you have been involved in drones or GIS to any extent, this section should come naturally. I would breeze through this section to make sure you understand the basics of GPS, datums, projected coordinate systems, and other GIS fundamentals, but your study time will likely be better spent elsewhere.
Cadastral and Boundary Law
This section is nasty. There is no way around it. Around 30% of the exam is composed of you-know-it-or-you-don’t questions regarding survey law. Unlike the previous sections, it is very difficult to divine or derive from first principles the answer to these type of questions. I am strongly unmotivated to commit trivia to memory, but that is exactly what is required here. I enjoyed giving this section a quick read to understand the origins of property law, but I did not spend adequate time memorizing the various terms, rules, and exceptions to those rules. If you are like me and have no inclination for flashcards, I would recommend quickly scanning the section and identifying common themes that can be used to answer more specific questions and back out the number of themes you need to commit to memory.
If you are a strong memorizer, you can guarantee yourself a pretty good start on a passing score by simply memorizing most of the concepts in this section.
Mapping
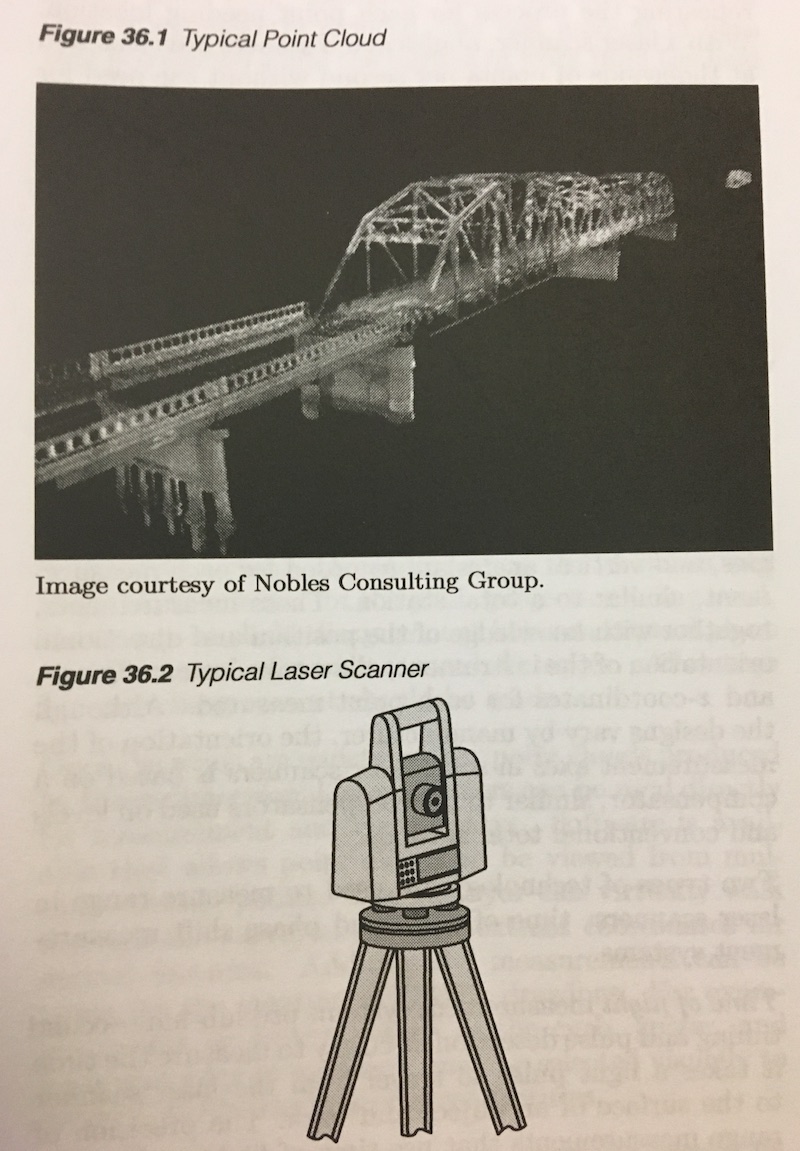
After the experiencing the heartless gauntlet of cadastral and boundary law, you earn a rest in the world of mapping. Coming from the drone world, the mapping section should be very straightforward. You must understand the principles of photogrammetry, contours, control, GIS, and LiDAR. I read this section mostly out of interest and curiosity and didn’t return to it until the exam.
Specialty Surveying Areas
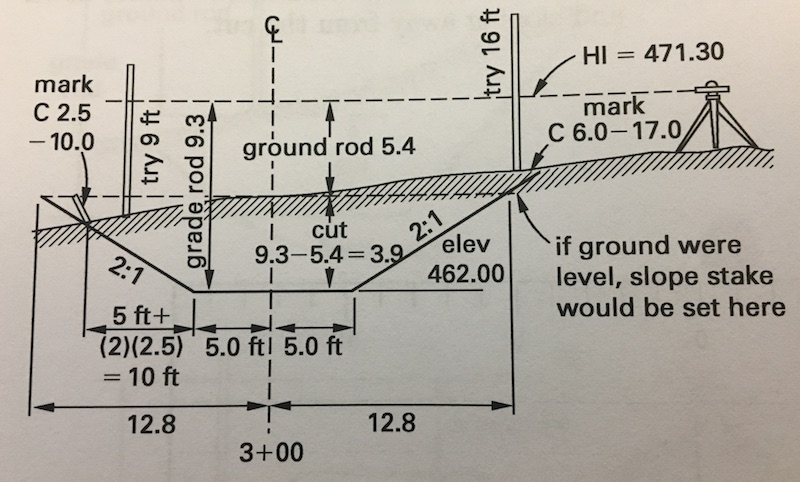
This is where you should spend the majority of your study time for two reasons. First, every problem in this section requires knowledge of each of the previous. You are not going to calculate the staking pattern of a curve in a highway without geometry, survey fundamentals, plane survey calculations, and possible boundary law. Second, and most important, your customers/competitors are doing this type of work right now. As I mentioned earlier, drones are fundamentally a topographic survey tool. This section covers topographic surveys in depth. Perhaps your tool involves construction staking. Drones and other tech tools can help with that as well. I would encourage you to solve a handful of problems from start to finish and really think about how your tool could either increase speed, accuracy, or safety. Put yourself inside the head of the survey tech taking measurements for a cut/fill estimation and visualize the labor required versus your solution. Visualize the final deliverable and understand how the data are manipulated into a final product. Even better, if you have time, connect with a survey crew and try your newfound knowledge in the field. This section only represents 10% or so of the exam, but these tend to be the most time-consuming questions. Give yourself plenty of time to savor them by saving them until last.
Computer Programming/Business Management
This final section deserves a quick review, but should not present any kind of challenge. Understand how to select projects by NPV, how to make ethical decisions, and the basics of logic and you will ace this part of the exam. Consider this a 10-question gift from NCEES.

My results
In the end, I probably studied a solid 20 hours for this exam but would have been more comfortable with more time (I suppose this is a truism). I calculated that I knew the answer to 75% of the questions with good-to-excellent certainty and guessed on the rest. Assuming that I nailed 90% of that 75% block and 33% of the rest, I likely nailed about 75% of the questions, which turned out to be a passing score. NCEES doesn’t appear to publish any guidelines on the raw scores needed, so this may be the only quantitative estimate on the internet.

I have not yet filled out the reams of paperwork needed to become a California-licensed Land Surveyor-in-Training, but I am excited to join their ranks and that I have taken the time to learn the fundamentals of the profession. The professional empathy I have gained by going through this somewhat painful process has already paid dividends in my role at 3DR and I would highly recommend that anyone in the space follow my lead. Product management by method acting is pretty darn powerful. After all, the best way to know the customer is to become the customer.












{kind=link}