As i wrote in other threads, i power my em-406 gps module from a arduino data-pin.The gps module runns well, most of my code is written.I just started installing all of my hardware into my UAV_Eins airplane/drone.
Shortly after "power-on" i found that i get horrible glitches on all receiver channels i read.I saw that these glitches (about 20% drop of the signal) occour relatively periodic.....I recorded the signal an the millis(), and got this "wonderfull" graph:
Disconnecting the gps module resolved the issue for the moment. The code works well, without the gps module.It seems that the gps module draws to much power while sending data. The glitches are veryvery periodic by 1second. (1024,7ms in average)I think there are some options i have now:1. Power the GPS module from seperate battery (with gnd connected of course...)2. add voltage regulator to my doughter-board, to power the gps directly from the lipo battery3. use the 5V pin of the arduino10000 board4. add a capacitor to the data-pin i power the gps nowSolution 1., 2. and 3. would result in the fact that i would have to disconnect the GPS everytime want to upload new. code. currently i only have to reset the board, and start the upload within of 2seconds.The result for me: i have to give the capacitor a try!! I have to search my electronic stuff boxes, to find some capacitors i can use, hopefully it will work.Does anybody now how to dimension the capacitor???
Read more…
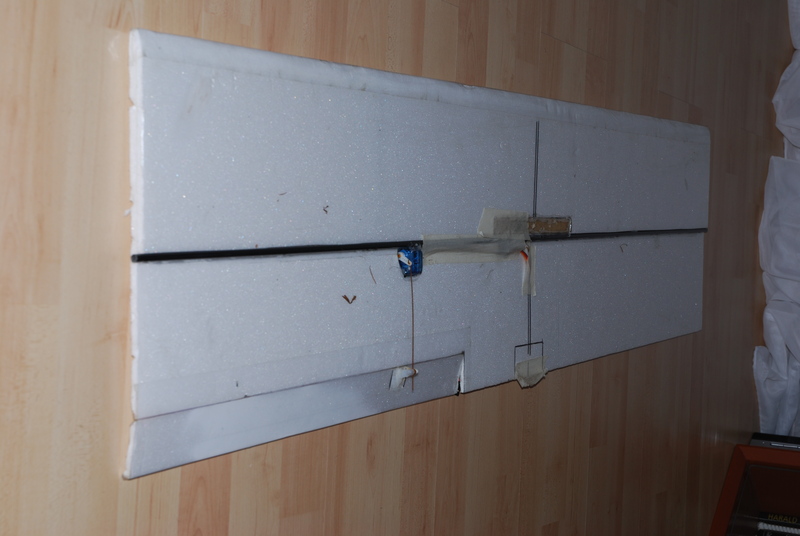
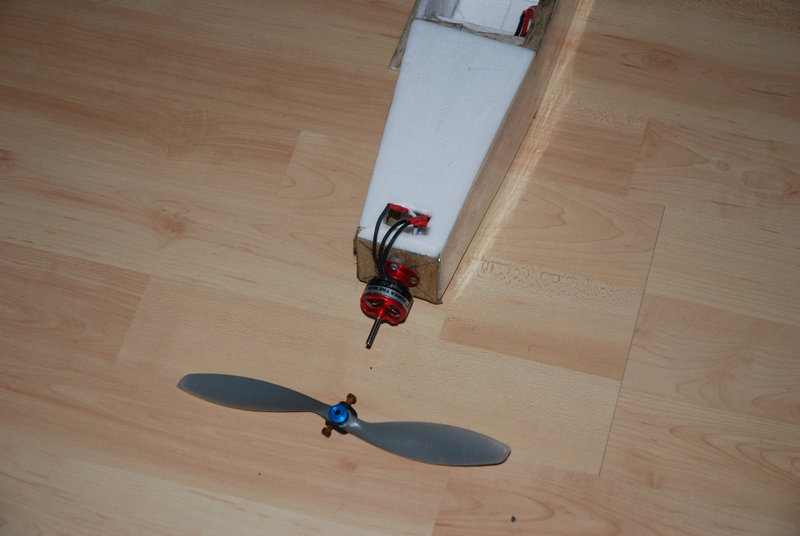
As i postet here, i lost my UAV_Eins (one) due to "environmental effects".As i christmas wonder, i got a message that it has be spotet in a bush a couple of kilometers away from the airfield it was lost...Today (about 5months later!) i got it back!!The fuselage and wing is in 99% perfekt condition!!! No structural damage... :)Only the balsa wood is gone, due to the rain and weather. (its pretty wet in norther germany at the end of the year)Here are some pictures of this long-time-traveller...
Edit: Seems that 2 servos are scrap, the rest works just fine.....receiver, esc, motor, fma baord and sensor, the other two servos....everything is working... :)i think it will fly this week
Read more…
Posted by HugePanic on September 29, 2008 at 9:30pm
Since UAV_Eins is MIA since a couple of weeks, my projekt slowed down a little bit.I also burned my arduino board, and had to replace it. "5V" really means output, NOT input... ;)The new arduino arrived a couple of days later, together with the em-406a GPS module.. :)The first GPS-code a copied from the arduino HP worked perfektly.I also ordered a arduino prot shield to replace my wire construction for servo connection. now i can just put it on the arduino at once, and everything is connected. Power for the arduino is seperate now direct from the lipo battery. The receiver and servos are powerd by the esc. Only the gps is powerd by the arduino, so i keep the load for the arduino voltage converter low.Then i tried to use my "old" servo controler code with the new board.The funny thing is that the two board (old and new) are NOT compatible!!!!The pulseIn commands reads about 1k more "signal" from the receiver. This also brought some problems with the used integer variables. It took me about 2 evenings of work to figure that out.. :(Current Status is solved! :)Next step is to merge everything together in one big autopilot code.I will copy (and slightly modify) the arduino GPS functions, but write my own navigation code (all to be published).I will post an image of the proto shield when i am done with it, still missing one servo connector for the FMA-CoPilot control....Maybe i can start with the airframe next week! I think this wont take more than 10h of work, so the smalles problem....regardsme
Read more…
Posted by HugePanic on September 14, 2008 at 1:00pm
I have bad news here.UAV_Eins hast left at about 15:30Uhr. It just disapeard in the windy skys over southern Hamburg.Way too strong winds, and no way to land securely at the village. So i had to steer higher to avoid further damage. It got just out of sight, and was nowere to be found.With no phone number or name on, the chance to get it back is minimal.So RIP UAV_Eins...RIP about 150€ materialRIP about 15h work...The King is dead, long live the King.. --> UAV_ZwoHere are some Pictures of UAV_EinsRegards
Posted by HugePanic on September 11, 2008 at 1:02pm
The plan for step 2 is to install the FMA - CoPilot as well as the Arduino board for rudder control.Yesterday the first flight with the CoPilot alone were sucsessfully done.This was the first time i was flying a aircraft with some stabilisation help. The FMA CoPilot is a veryveryvery impressive piece of hardware. It even saved the airframe from a crash during estimation of the COG.Now i have to explan the pitch issues i have had with the single aileron. As described in Step 1, the aileron results in large pitching moments.Before activating the CoPilot i was convinced to need a secon aileron.But with the CoPilot active, i had to rethink. The plane is so extremly easy to handle. Set a thrust level, and control it with the rudder. The plane flies like a slotcar on it's tracks. Veryvery precise and stable. I was able to start and land without further changes to the setup at the first trials.The pitching moment of the aileron is compensatet by the CoPilot. If it is necessary at the further development of the plane to recover the plane completely manual, i know that i can fly and land the plane securely. It doesn't fly pretty well in manual mode, but I don't care.Introduction of the Arduino board will start next week. I have to buy more parts....
Read more…
Posted by HugePanic on September 11, 2008 at 11:00am
Target of Step 1 was to build a RC Plane with "good" handling for the use as a UAV.I chose a Foam/Depron design with KFm1 (Kline-Fogleman) wing and a box type fuselage.Elevator and rudder are flat.Dimensions:Span: 1.25mLengt: about 1mWeight: about 500g (with FMA-Co-Pilot)These wings are a surprisingly well working compromise for a universal "utility" airfoil.The Step is located at 50% chord length. There is one CF spar, and a plywood reinforcement.First flight went well. I had to adjust the motor angles after that, but thats the same at all aircraft i think.One special point is the single aileron.I don't want to fly any aerobatics, so one aileron should be enough, and it is.After the first flight I enlarged the aileron until the wingtip, now there is enough authority for a uav, even at windy days. The only problem is was that the deep chord of the wings in combination with the single aileron design creates very large pitching moments.I have to programm my transmitter to get them away for manual flight.But the plane is easy to fly for me, event with manual compensation of these moments.See "Step 2" for more about this
Read more…
Posted by HugePanic on September 5, 2008 at 1:30pm
This is a report of my first scratch build UAV.Great News, i just finish the maiden flight tonight! Everything went well. Aileron controll is litte too less, as expected with just one aileron! ;)I have to move COG and enlage the single aileron before the next few testflights.BASICSStep1: (Still under work)/b>-Build a RC plane with at least 300g of cargo capacity.-The cargo compartment shall be located at the COG, size about 100x100x150mm.-Two smaller cargo bays. Located front and aft of the COG. Sizes are 60x60x120mm each <-- Updated-The plane should be flying stable, with a low wingloading and good flight characteristicsStep2:-FMA Co-Pilot stabalized flight-Arduino-Auto-Pilot controling ot the rudder for simple maneuvers-Autopilot can be switched during flight (remote controlled)Step3:-Installation of the GPS Sensor-Autopilot controls throttle and HeightStep4:-Waypoint navigationStep5:-Autopilot controlled (throw) launches-Autopilot controlled landings.Design GOALI like the KISS prinziple. So everything should be cheap, but good.My ideas:-Use a single Aileron on left wing only-Mount the FMA-Sensor on a movable platform for advanced Aircraft control (see Forum)-Use the standard aproach with a Adruino Board-Materials:-6mm Depron-CF wing spar-2.5mm Balsa for reinforcement-Lots of hotglue, some tape and a minimum amount of epoxyPart List:-Arduino 10000 Board for Autopilot-FMA Co-Pilot-Cheap 150W Outrunner-25A ESC-Graupner 8Ch Syntesizer RX-3s 1000mAh LiPo Battery-Cheapo 10g Servos for about everything (Aileron, Rudder, Elevator, Sensor-Tilt)Read more…