[Updated the PCB/SCH with the latest version:
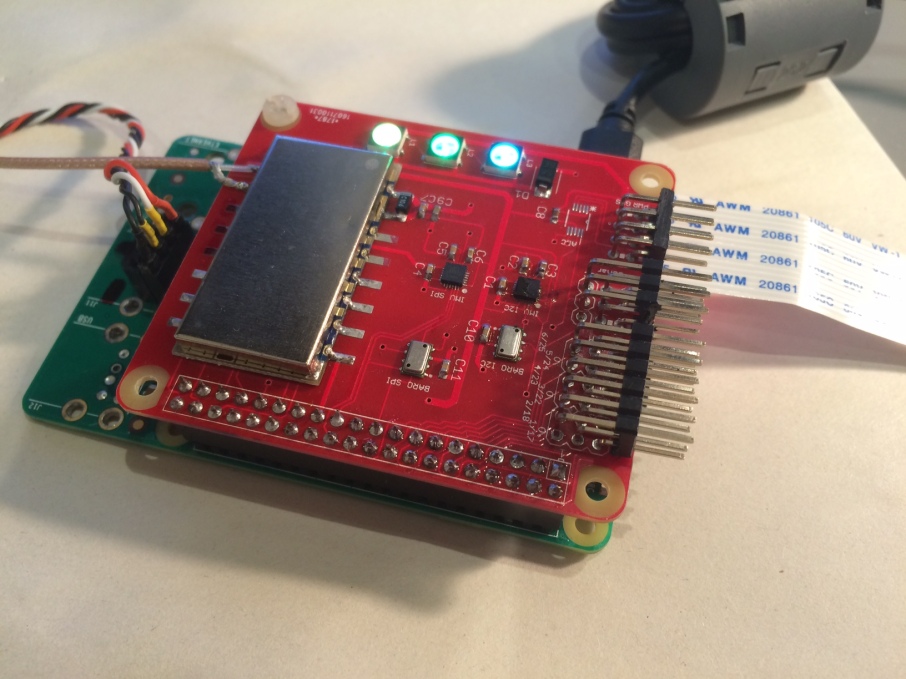
- added a diode for the LEDs to drop the voltage from 5V to lower so the input (3v3) is lower than 0.7 VCC
- fixed some parallel traces on the top and bottom of the board
- broken out i2c on another pin header]
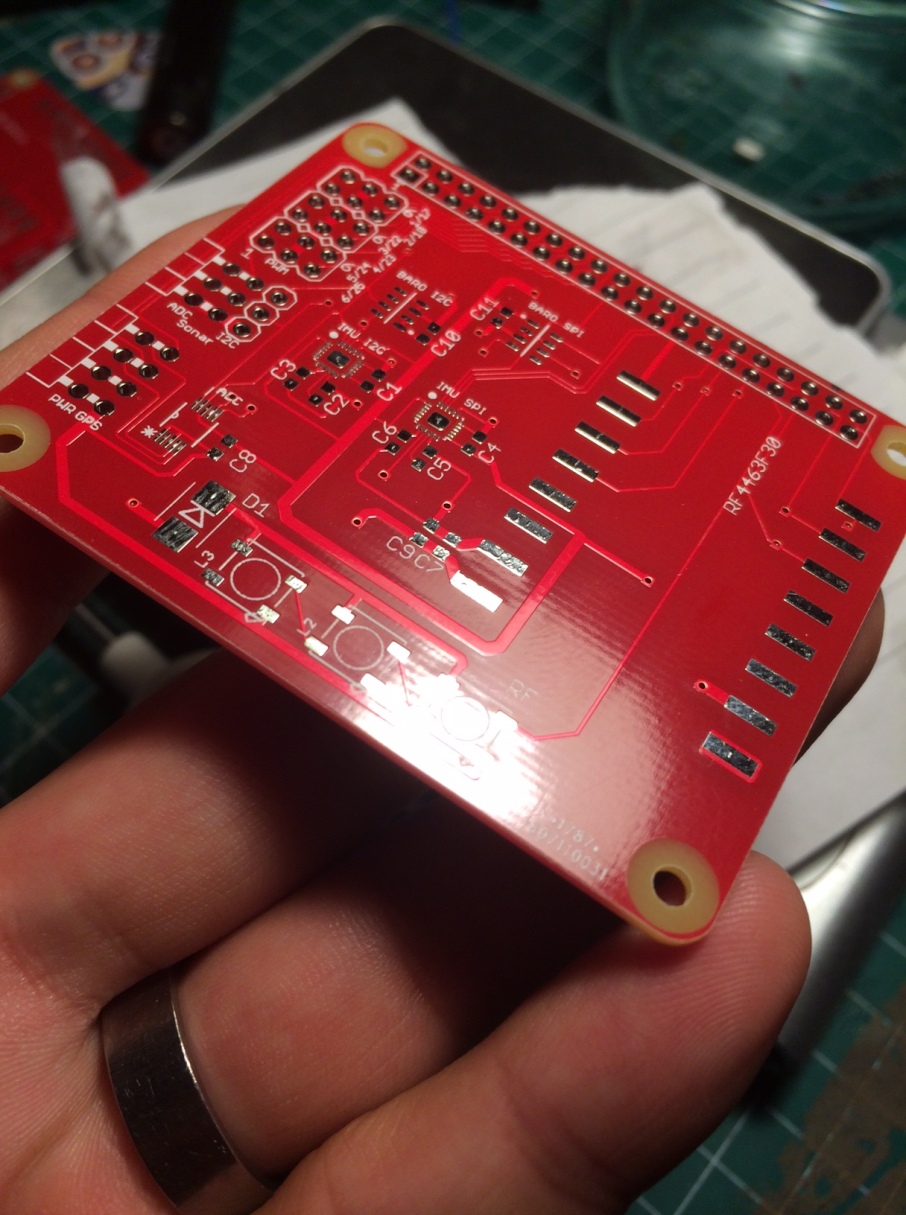
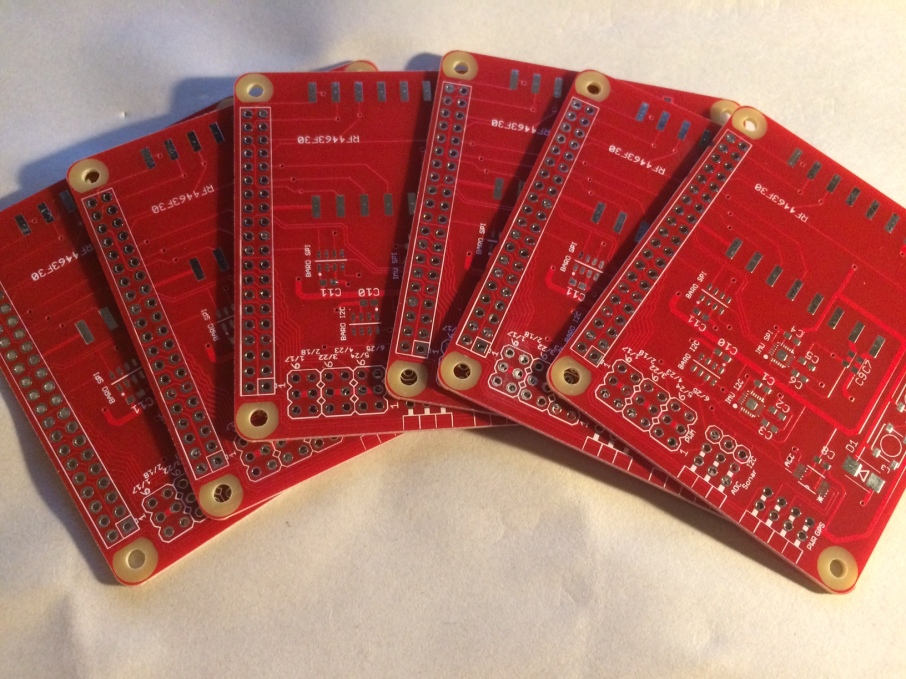
I started working on a custom FC board for silkopter and soon I will receive the first PCBs.
It's meant to be used as a Raspberry PI HAT and all the software (silkopter) runs on raspbian.
The board is 2 layout and can be printed (I hope, still didn't receive them yet) using DirtyPCB for ~30e for 10 boards. It was developed with the free version of eagle (hence the 2 layer limitation) in the past week.
Eagle schematic and PCB layout are on github
My goal with this board is to have solid, long range RF integrated into the board, add sensor redundancy and experiment with SMD as a side quest.
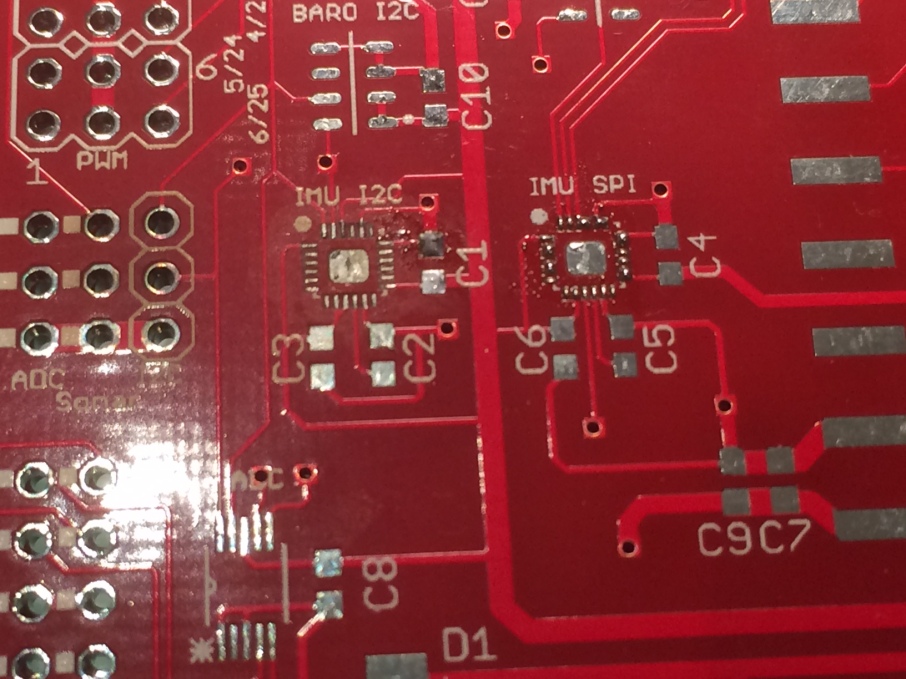
Sensors:
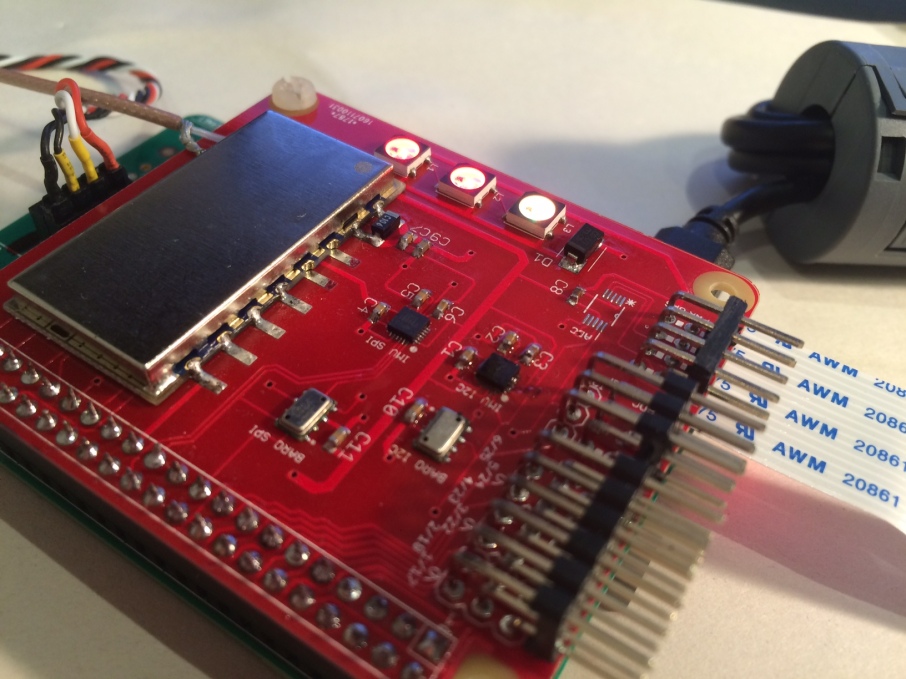
- Dual MPU9250 9-axis IMU, one on SPI and one on I2C. They will both perform @1Khz
- Dual MS5611 barometer, one on SPI and the other on I2C @100Hz for both
- ADS1115 16bit ADC for current/voltage sensing
- Input for a serial GPS like any ublox (3.3V signal)
- Input for a serial sonar like MaxSonar. Works both with UART and RS232 signals (normal or inverted, 3.3V both)
RF:
- Either a RF4463F30 board (-126dBm sensitivity, 1000kbps, 30dBm power)
- Or a RFM22B board (-126dBm sensitivity, 256kbps, ~20dBm power)
Outputs:
- 6 PWM. I plan 4 motors and 2 for gimbal
- 3 RGB leds (NeoPixels or WS2812b)
A skilled developer could adapt Arducopter to support this board in 1-2 weeks. The trickier part would be the RC part to make it use the RF board instead of a classic RC receiver.
I'm also developing a custom RC system with a Raspberry PI, a touchscreen for FPV digital video (800x480 resolution, 2000kbps), a 3 axis gimbal for yaw/pitch/roll and a motorized slider for thrust control.
I'm working now on the component selection and schematic.
The build log is here.
Feedback is welcome, it's my second PCB ever and my first one with SMD and especially a QFN package.