If you're starting in the mapping business and don't or can't afford to invest in more expensive equipment for your plane/copter but have a good Sony Alpha camera (A6000, A5100, A5000, etc) and some Nikon or Canon models, don't want to risk damaging them with risky experiences, you want to make the camera autonomy dependent on your current plane/copter autonomy and not the reverse and don't want to waste thousands of euros in more equipment but as low and wise as 60 eurobucks, then the following reading might be perhaps of your interest. So lets begin...
You want to keep things simple, cheap and light with top efficiency, and don't want to mess with usb cables (why inserting things in your camera and creating metal fatigue with time when you can do the same with infrared light without any contact?) then here's a link where you can buy it for Sony, Nikon and Canon for about 10 eurobucks, here's the link:
http://www.flytron.com/19-rc-camera-shutters
I guess that those triggers are even open source and if you know about electronics you can even make it and program your LED to blink the IR light according to each camera's shutter code pattern. But for this price I'd rather just buy them in bulk.
With high PWM it shoots picture, with low PWM it starts or stops filming, and with neutral PWM it waits orders, as simple as that, and you don't even have to bother with coding specificalities whether it's nikon, canon or sony, just plug it to a pixhawk channel, configure in mission planner that channel as shutter, and that's it!
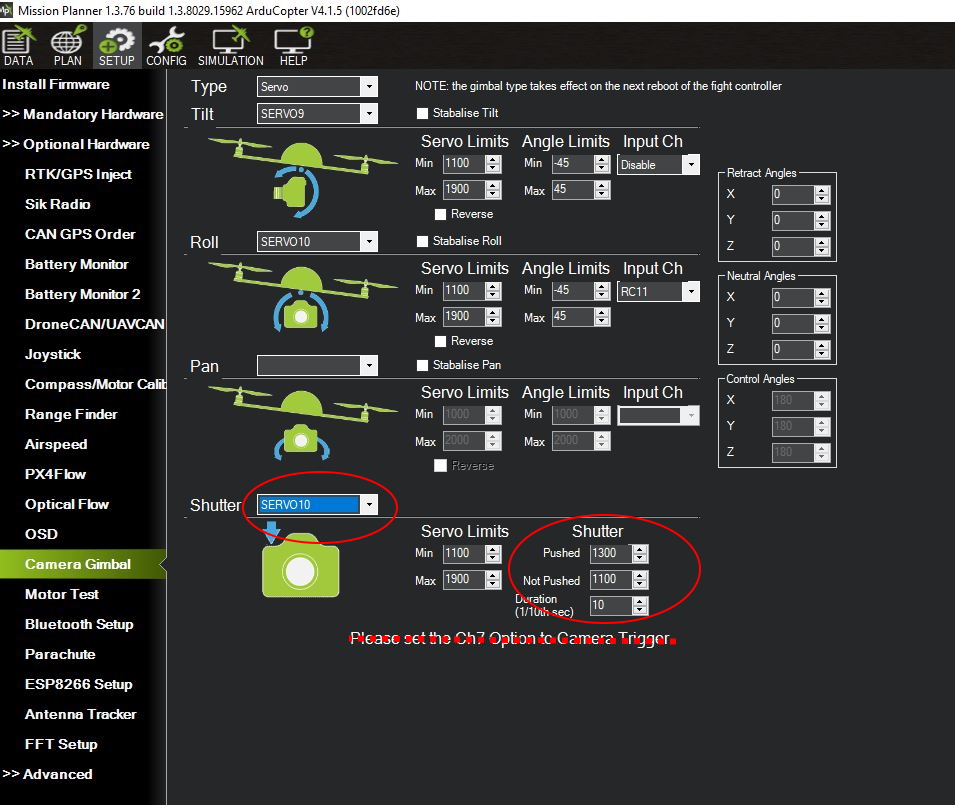
Heres the classic camera shutter configuration from the documentation of APM at http://ardupilot.org/copter/docs/common-camera-shutter-with-servo.html:
Don't forget to have your camera activated infrared remote control. With Sony it works this way and with Nikon and Canon it can't be much harder than this too (I guess!):
To know that it's working correctly go to the Flight Data tab in Mission planner, right click on the map and chose Trigger Camera NOW. If the camera shoots a picture (make sure the LED points the camera's IR sensor at at least 1 or 2 meters away, but i prefer to just tape it next to the IR sensor), then it means the remote IR LED shutter is well configured and ready for work. If it starts a film, then just reverse the channel, and it'll start taking pictures.
From this point when you make a mapping mission your camera will shoot only when it's needed. No more hyper redundant picture shot by interval of time, or complicated hacking to your camera. Just the right pictures at the right time, no more no less.
By now all you need to do is prepare the Mission Planner to know your camera parameters and how to trigger the shutter only in the exact moment and here's the video explaining it:
https://www.youtube.com/watch?v=pQE4XWLqdmc
In the Trigger Method tab chose the CAM_TRIGG_DIST so the APM or Pixhawk gives the order to your camera to shoot the picture from the correct distance from the previous picture (it's the most efficient method).
If your camera isn't listed at Mission Planner camera's list, fear not! Create your own Camera Profile, after all it's just an xml file underneeth it. You just need to know the basic camera specifications. I found mine here:
http://www.imaging-resource.com/PRODS/sony-a6000/sony-a6000A.HTM
but it's always better to cross check with other sources (yep the manufacturer too :P) to make sure it's right. In this case it's right! :)
In my case (Sony A6000) the settings are as follows:
Save it, give the name of your camera, and it'll join the "authorized" mission planner's camera list giving you every single detail of your mapping flight mission. Sweet!
By now you are 100% ready to make mapping flight missions with full control of your plane and your sweet and trusty camera, and it costed by now only about 2 grams of payload with your LED camera shutter and 10 eurobucks plus shipping to your wallet.
By now you must be thinking YAY! Love this, can't wait to start mapping missions like a pro! And I then I tell you! "STOP!", and you ask "Why stop? What's wrong?", and I tell you "But there's even more sweet news to you!", and you ask "But what can be better than all this info you just gathered in one post?" and I tell you "I still have to tell you how to have your missions limited by you plane/copter's authonomy and not by the camera's battery weak authonomy of about 400 pictures!"
And now i'll proceed by telling you how to have the camera's autonomy to be able to make thousands and thousands of pictures tirelessly for about 12 eurobucks plus shipping.
First, buy a DC coupler compatible with Sony's battery NP-FW50.

I've bought mine at Amazon and weights about 30 grams:
http://www.amazon.de/dp/B00MHV677K/ref=pe_386171_38075861_TE_item
If you have other cameras just google eg Nikon or Canon DC Coupler and buy it from the best price.
To know more about the principles in using a dc couplers also known as "dummy batteries" with cameras watch this. It's easier then you imagine.
https://www.youtube.com/watch?v=qGZMfAHQBEo
In our case you'll power it to a ubec with around with steady 7.2V. Use a female connector in the ubec side, so you wont need to cut and adapt the dc couple plug. Don't forget to put a common LiPo battery or whatever capable of powering the camera for the whole flight. After all that's the point we want!
Additionally, if you want to FPV vertical videos (boring if it's the only camera) or want to pay attention to hundreds or thousands of pictures to see which ones get blured (gosh, what nonsense!) instead of paying attention to flying, just buy this Micro HDMI to AV converter for 21 USbucks plus shipping at Hobbyking:
http://www.hobbyking.com/hobbyking/store/__66466__Micro_HDMI_to_A_V...

As usual if your camera isn't compatible with this, find one that is.
If you want to enjoy real FPVing with a frontal camera while piloting and then ocasionally check the mapping camera working right, you just need to buy a multiple camera switch controlable with a free channel in your radio, then buy this for 19 eurobucks plus shipping and weights about 2 or 3 grams.
https://rc-innovations.es/First-person-view-uav-multicopter-plane/F...
And that's it!
The Advantages of using these parts to your mapping missions with APM and Pixhawk are as follows.
- Dirty Cheap! Summing all parts (excluding the camera) used in this post it all costs around 60 euros;
- All components are very reliable and are non-vital for plane in case of failure;
- Light weight;
- The LED shutter uses IR light and not wifi spectrum frequencies which are susceptible of interfering with other RF transmitters/receivers in your plane/copter;
- You don't create metal fatigue with USB connectors, extending your camera's life expectancy.
- Tremendously increases the flight times of your mapping missions, increasing the covered areas per flight and thus being much more productive;
- It's that easy to assemble and understand even to noobs or people who just want to do more mapping and mess around less with electronics;
- You can georeference your photographs by using the mission planner tool as refered in this documentation with the much much much higher precision of the moment and position (and not estimated with the offsets method) where your camera was at the time of each picture was made;
- It takes only a couple of minutes to have your picture files geotagged;
- You don't have to mess around at all with your camera and thus voiding your manufacturers warranty. My camera survived warranty time and the extended warranty that I paid for (another waste of money) and it still works as good as new. (Thank you Sony for your outstanding products!);
- You can quickly shuffle your camera to work mode and tourist mode without nobody noticing they are in fact the same camera;
The Disadvantages are:
- If you want to buy a ready made system in one piece from one supplier instead of buing parts from several originsperhaps to save on shipping;
- There's no customer support and you're on your own if you chose this option, and that's a shame!
- Name yourself a reason.
One last tip:
If you want to avoid blurried images and happen to have a good camera such as the ones refered here, use a very large memory card, set your camera to produce RAW+JPG images files simultaneously, you'll thank later, use manual mode and get used to change the shutter speed, apperture and iso values to reduce bluried, too dark or too light pictures, etc. With experience you'll find that sweet spot with those 3 variables to be used ideally in any weather conditions'. Don't use auto mode, not even when you use the camera in tourist mode because it's lame and unprofessional. ;)
Read more about it here: https://photographylife.com/iso-shutter-speed-and-aperture-for-begi...
In the next days I'll reveal in detail the hardware system, the workflow and the coding involved on how to do in real time extraction of pictures files from a Sony Alpha cameras, inject its timing and positional data from APM/Pixhawk, upload the already georeferenced files to the cloud (Dropbox, Google Drive, Meocloud or whatever that pleases you better), having those images prepared for data crunching in the office as they keep arriving, having the quality control of the (too blurred, etc) images checked in the office, preparing in the office a new flight mission to redo the pictures that failed the quality control with the same orientation and position (as possible) as the original ones, inject the new mission plan to the flight controller and proceed with the new mission, all that before the plane lands from the first mapping mission (that benefits already from the goodies that I explained above).
For that, an interested person will only need to buy a raspberry pi 2 or 3, a broadband internet dongle, a wifi dongle and a few jumper conectors, an internet subscription, not to mention having one pilot in the field and at least another in the office to get the data and a good plane.
Not considering the salaries of the pilot and the office dude, the plane, the camera, the internet subscription, a good local network service and the broadband dongle (prices vary too much from country to country to consider it), I believe that the hardware needed to implement this will cost around 60 to 70 euros. The sourcecode to make it possible will be free from the start.
So if anybody is interested in knowing how to do this too, stay tuned to diydrones in the next days.
With best regards,
Roger Monongo