I can't get enough of this platform
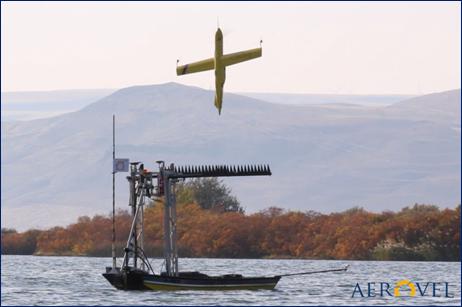
The aircraft is Aerovel’s 20-kg Flexrotor, which combines VTOL and small footprint with Hawaii-to-West Coast range. The carrier is a 4-metre skiff equipped to launch, retrieve, and service Flexrotor automatically. In what are believed to be the first-ever flight cycles of an unmanned aircraft based on an unmanned boat, Flexrotor launched from the remotely-controlled skiff while underway, climbed out as a helicopter, transitioned to wing-borne flight, imaged the skiff while flying at low and high speeds, transitioned back to thrust-borne flight, and retrieved autonomously onboard. The aircraft then shut down, was automatically refueled and restarted, and repeated the first flight, finally being secured onboard in a docking station. Aircraft and skiff then came ashore, and were driven 100 miles home into the setting sun.
Tad is a wonderful friend to sUAS News and we can't thank him enough for the scoop. Keep reading sUAS News folks we will keep you a couple weeks ahead of the rest ;-)
http://www.suasnews.com/2013/10/25645/first-flight-of-unmanned-aircraft-from-unmanned-boat/
Comments
i am mostly amazed at the auto landing on a moving Base!!
I could never understand why there are so few tailsitters. That's an ideal configuration for a vtol capable UAV. The only reason why it wasn't used much for manned aircraft was limited visibility and akwardness of the position but those reasons are not valid for UAVs
That is quite an achievement. Was the landing really autonomous?! A great achievement whether it was or not.
Some of very radical ideas put in use. Very inspiring. The tail folding flat to fuse while landing is nagging in back of my mind however.
extremely well done!!!
bravo hats off for those guys
instead of complaining make it better :)
Don't forget Tad developed the ScanEagle and flew the Aerosonde across the Atlantic so I am sure he has some interesting ideas for this one.
I was wondering why it looked like another prop was in the video.
Pretty neat. I didn't realize it was a single rotor. How are they countering torque? Aileron deflection?
Landing does look pretty sketchy. I wonder how much wind it can handle?
I like the way way it fully commits to the landing. :)
Really nice UAS and performed really well though I see 2 problems.
The first compensatable that transition to horizontal flight seems to require a considerable loss of altitude while diving to pick up fixed wing flying speed.
And the other, probably more serious problem seems to be that that pin point landing method is going to have very serious difficulties in any serious windy or gusty conditions.
It gave me a thought though drop a retractable tether and let the landing base pull it in.
Like the Navy and Coast Guard does with their manned copters to small ships and tiny landing platforms on pitching decks in nasty weather.
Just a thought,
Gary
It looks like the skiff is powered by a trolling motor. I think that you can see the trolling motor on the stern of the skiff. They must have a large servo mechanism attached to it to provide directional control?
Regards,
TCIII ArduRover2 Developer
-
1
-
2
of 2 Next