We managed to get our hands into a Raspberry Pi 3 and decided to give APM a try with it using the PXFmini. Here’s a walkthrough over some of the tests that our team conducted:
Benchmarking
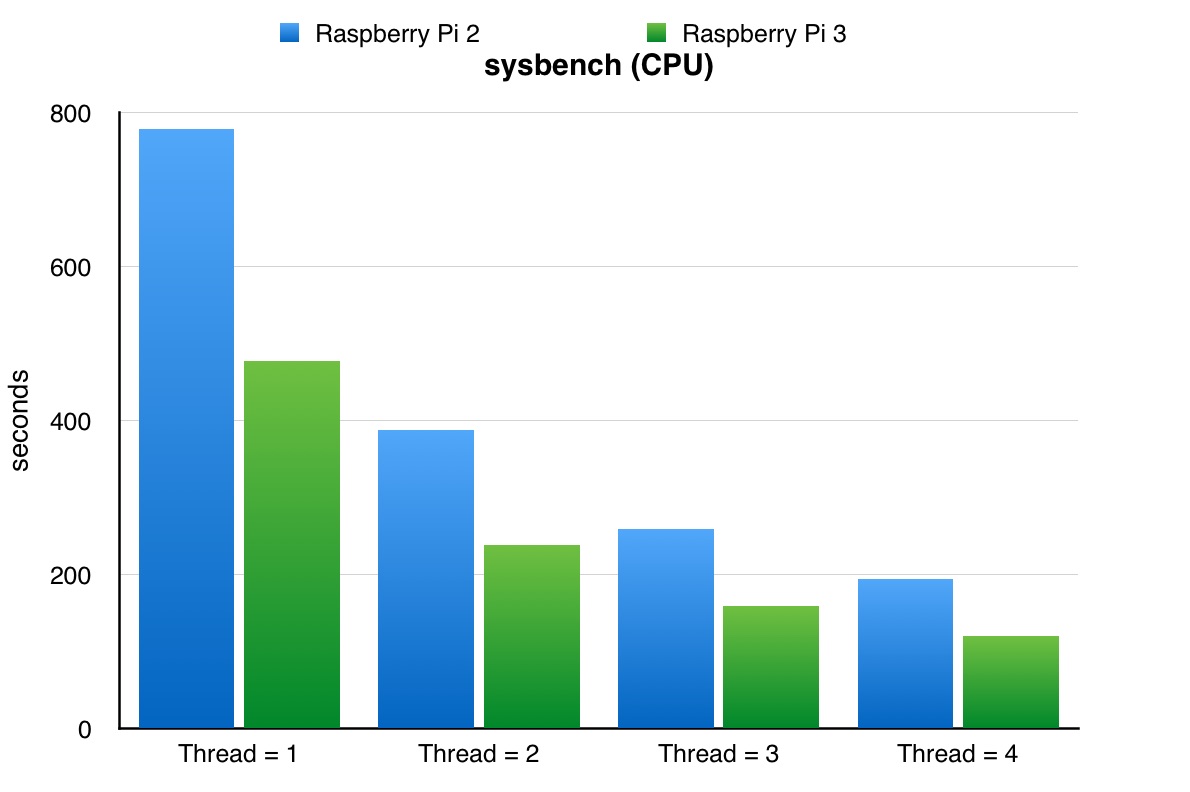
So, down to the benchmarks, we performed 3 types of tests using sysbench and the default Raspbian images (no APM running for now). SysBench is a modular, cross-platform and multi-threaded benchmark tool for evaluating OS parameters that are important for a system running a database under intensive load. The output of sysbench looks like this:
sysbench --test=cpu --cpu-max-prime=20000 run
sysbench 0.4.12: multi-threaded system evaluation benchmark
Running the test with following options:
Number of threads: 1
Doing CPU performance benchmark
Threads started!
Done.
Maximum prime number checked in CPU test: 20000
Test execution summary:
total time: 477.3324s
total number of events: 10000
total time taken by event execution: 477.3236
per-request statistics:
min: 47.69ms
avg: 47.73ms
max: 85.54ms
approx. 95 percentile: 47.72ms
Threads fairness:
events (avg/stddev): 10000.0000/0.00
execution time (avg/stddev): 477.3236/0.00
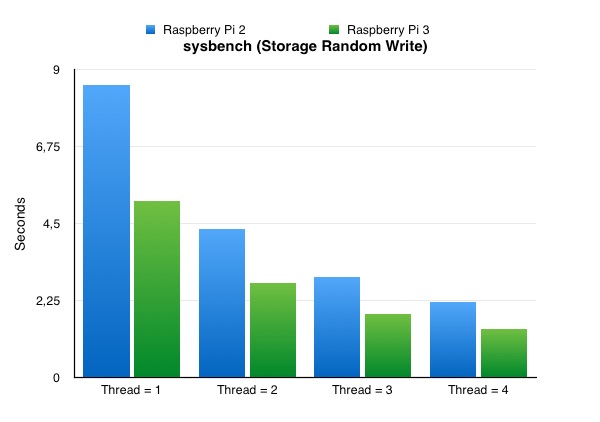
The output is graphed against the Raspberry Raspberry Pi 2 (note that smaller bars indicates better results):
sysbench --test=memory run --memory-total-size=2G
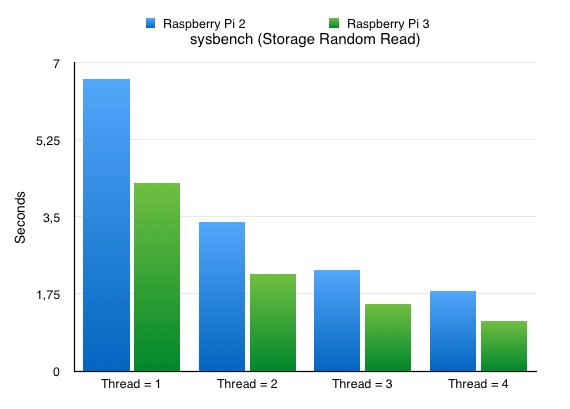
sysbench --test=memory run --memory-total-size=2G --num-threads=1 --memory-oper=read
The 64 bits CPU of the Pi 3 dramatically improves the results of this particular tests over the Pi 2. It’s 40% - 60% faster.
Mounting the autopilot:
We mounted the shield as follows which proved to be robust enough. Vibrations were kept at a reasonable level as will be shown later in the log analysis:
Flying with APM and log analysis
After a short flight we started some checks. The official documentation of APM will tell us:
“Check the scale on the left and ensure that your vibration levels for the AccX and AccY are between -3 and +3. For AccZ the acceptable range is -15 to -5.“
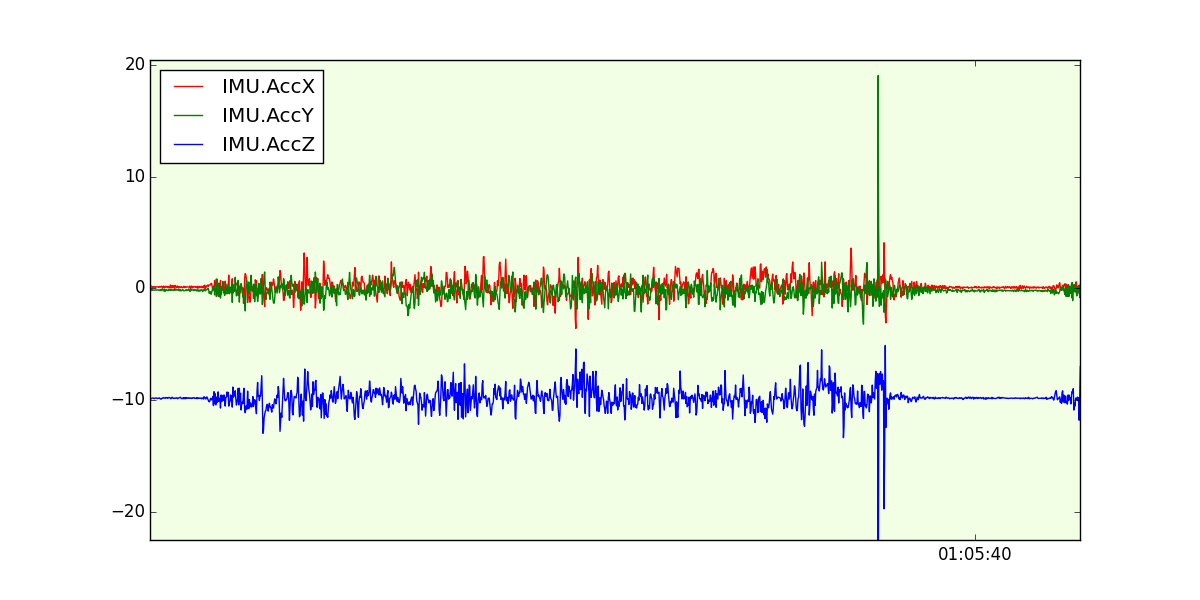
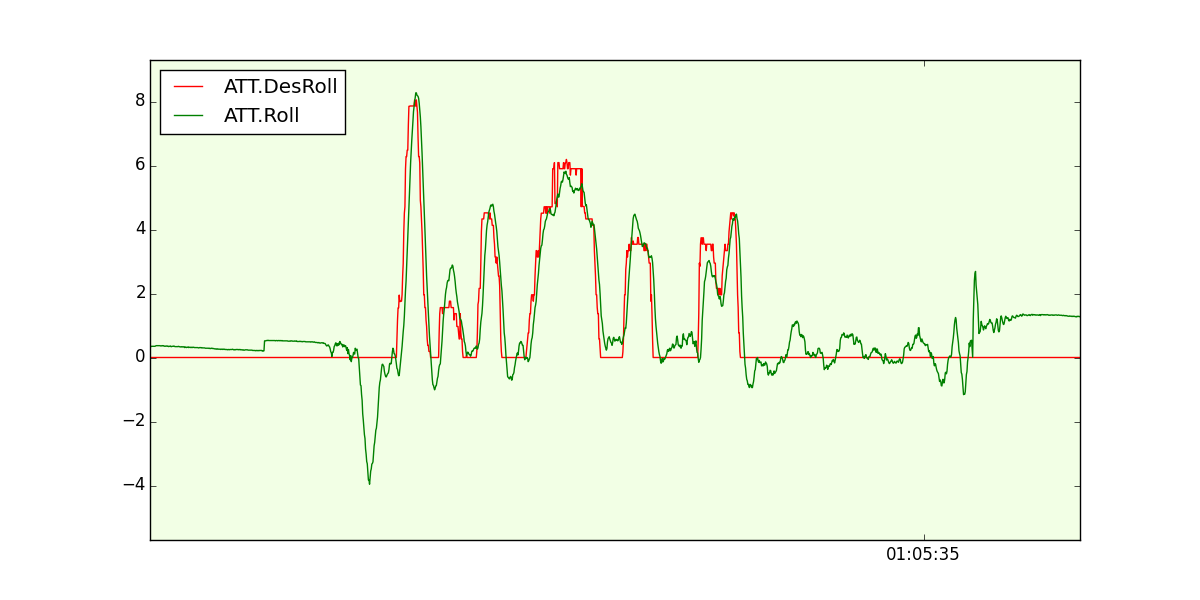
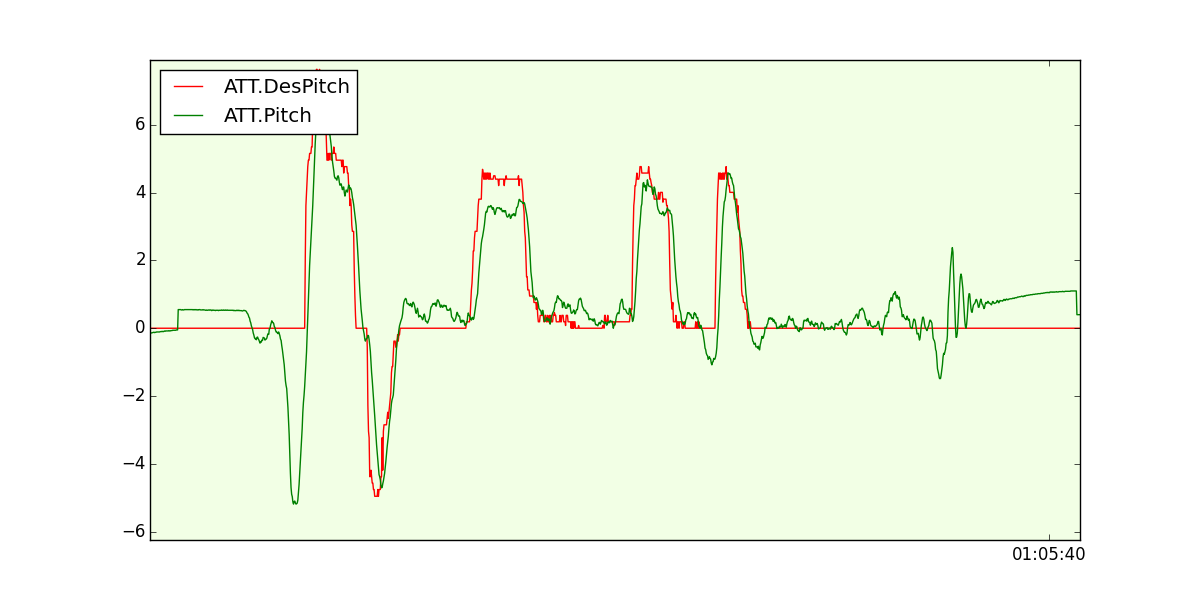
Fine on this. We also felt that the drone was reacting really good so made a few plots that convinced us about the autopilot responses with the Raspberry Pi 3:
Conclusion
Raspberry Pi 3 is a great candidate to make APM Linux autopilots using the PXFmini!. Having Bluetooth and WiFi is indeed a great asset removing the need of using additional USB dongles unfortunately, WiFi is solely b/g/n and does not support the 5 GHz frequency band (which comes handy when flying with RC controllers that work in the 2.4 GHz band).
Comments
The OS is available for download on our docs. In case you want to try it.
@JB, I agree that the new Raspberry compute module if it will feature the new SoC of the Pi3 should make an excellent cheap CC.
I have the old version and I am very happy with it, it has a very small footprint
Lol Jerry. Do you mean this one that RS carries still (and element 14 etc):
http://au.rs-online.com/web/p/processor-microcontroller-development...
---
@Victor
There's a new compute module coming with the 64Bit Pi3 hardware.
Jurgen from Auvidea is already making boards with PXH2, Edison and TX1.
If another version of the PXF is made I'd really like to see a MCU instead of the PCA. Plus it will be necessary to route out both some USB and the MSI for camera etc use. With the SO-DIMM slot connections of the compute module I'd try to keep it as compact as possible for small frames. It should also follow the same schematic as the existing module, so it's possible to get a head start now already before it comes out. It could be marketed as the "improved version" of the Zero PXFmini, with computer vision, for only some $35 more. (the cost of the Pi3 Module over Zero).
Layout wise I'd have the 2x USB/MSI up one end for camera/ext. wifi with PWM/RC up the other end for ESC etc. It's also possible to integrate a 4ch ESC in the same form factor as a extra daughterboard underneath the PXF for super compact setups with 3 stacked PCBs (under 50g).
Regards
Hi Jerry,
The TX1 is indeed interesting. I'll PM you on this matter.
Regards,
Pi computing Module has been obsolete now, RS-online now dropped it.
Great report for the timing and quality.
I will begin tests on nVidia TX1, hope we can work together.
JB,
I have no experience with the pi compute modules but sounds like an interesting idea. Will give it a though.
Kabir,
No it does not unless you apply a lot of force. The header and the spacers seem to do a pretty good job.
Does the single-sided mounting make plugging in connectors difficult? Does the board not flex or bend?
I like forward to the new A53 Pi compute model based PXF mini....when will you make it? The new compute module will be here in a few months. ;-)
None that i've been able to identify. For now, we are powering the Pi3 through the autopilot shield and using several dongles on it. Raspberry pi org mentions that it may be more power hungry though:
-
1
-
2
of 2 Next