I've been using this one in beta for a few months and I'm really impressed. Now it's available to everyone on Indiegogo. FlytPod combines PX4 and ROS in a very easy-to-use SDK, with an onboard HTML-based ground station and a powerful Odroid-based computer with a long-range Wifi access point. A great deal at $399 for the early bird special.

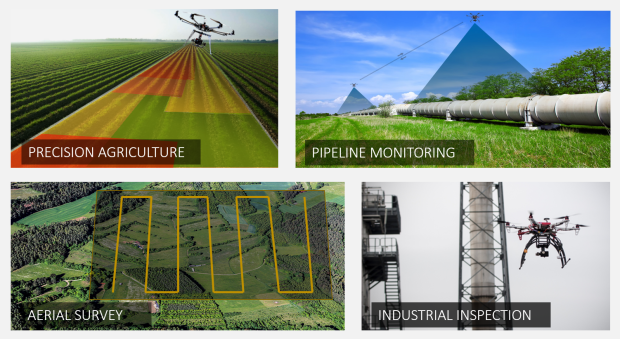
Whether you are building a drone for Agriculture, Inspections, Surveys, Delivery or Emergency Response, FlytPOD will help you accelerate your development. It comes with a hybrid architecture and a reliable sensor suite for safe operation of drones. Further, its powerful processor, communication system, support for variety of payloads and framework for developing onboard and offboard user apps will give you a headstart in building advanced drone applications.



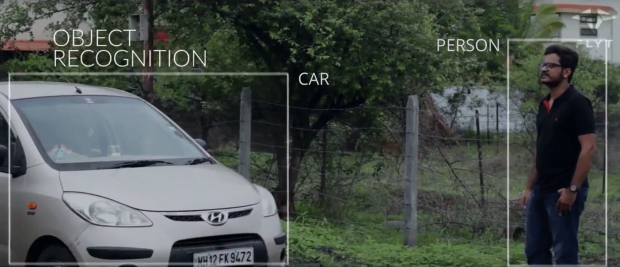
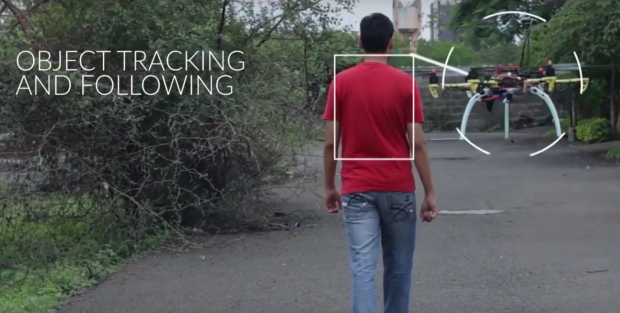
RUN ADVANCED ALGORITHMS ONBOARD
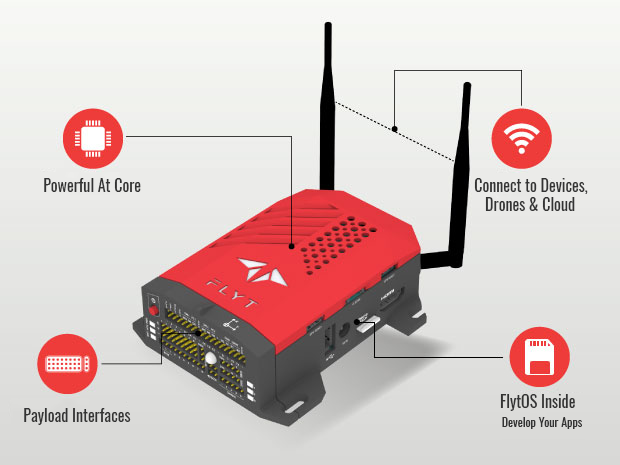
The octa-core processor allows for implementation of computationally intensive algorithms. This opens doors for AI techniques with Computer Vision, Machine Learning enabling intelligent onboard decisions.


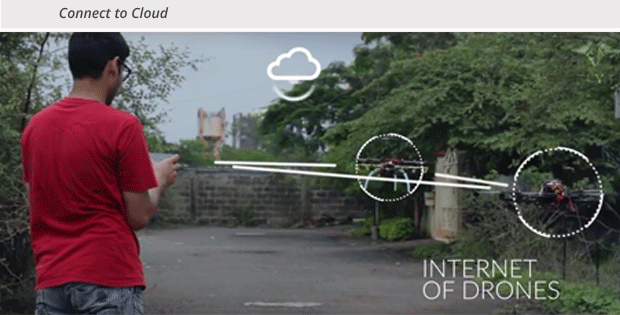
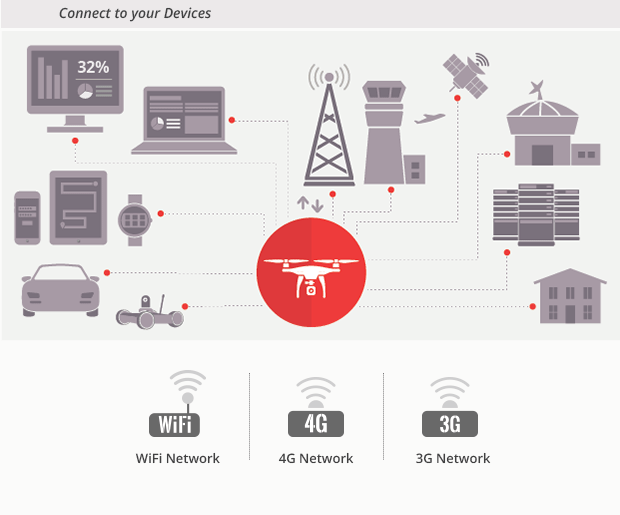
BUILD INTERNET OF DRONES
FlytPOD’s communication architecture allows your drone to connect with other drones, share data with ground devices, be it mobile, laptop or wearables and also connect to the cloud. Build internet of Drones with standard connectivity interfaces over WiFi, 3G or 4G.
INTEGRATE YOUR PAYLOADS
FlytPOD’s hardware interfaces are designed to support a variety of payloads so that you can equip your Drone with specialized sensors or actuators as required for your application domain.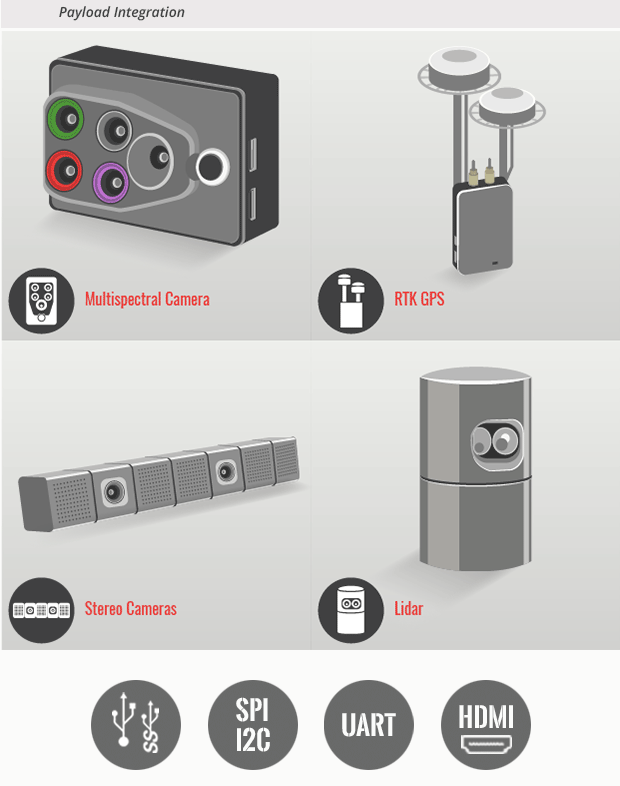
RUNS ITS OWN OPERATING SYSTEM-FLYTOS
FlytOS is an Operating System for drones. This provides a solid foundation and a framework for developers so that you only need to focus on your business logic and you can quickly build apps specific to your domain.
FlytOS is based on Linux and ROS (Robot Operating System) making it an ideal platform for research and commercial drone applications. It comes integrated with proven PX4 autopilot codebase and provides high level functions for drone autonomy through FlytAPIs in ROS, CPP, Python, RESTful and Websocket.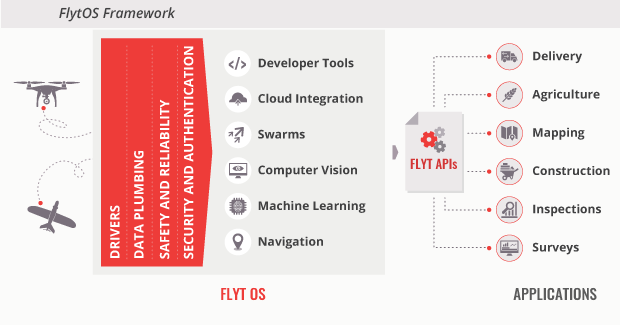
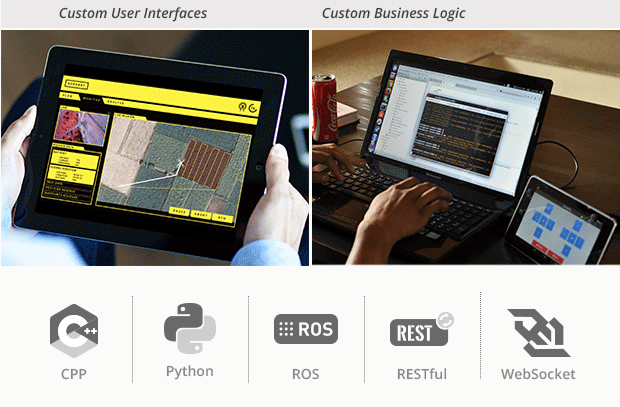
BUILD SIMULATE DEPLOY
You can develop web or mobile apps for drones in your favorite development environment using the open FlytAPIs. The apps can be tested in FlytSim - 3D Simulator before the drone even takes off. FlytSim supports all the FlytAPIs and the simulated drone includes a RGB camera mounted on a 3-axis gimbal along with a front-facing RGBD camera. After successful testing in simulator, you can easily deploy the apps on FlytPOD.
The exhaustive documentation and forum will help you get onboard and will support you through your development journey.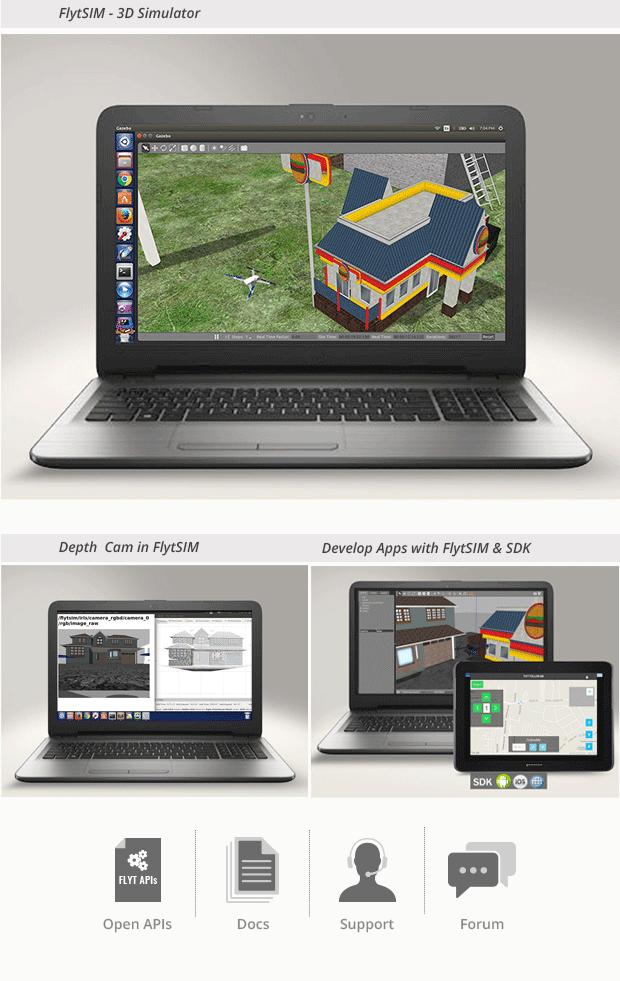

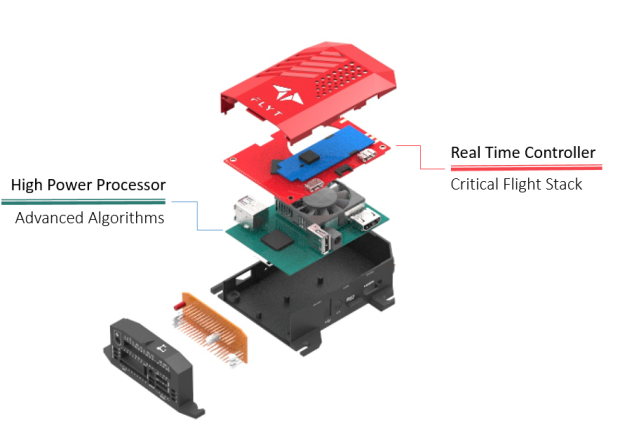
HYBRID ARCHITECTURE
FlytPOD has a hybrid architecture with a real time flight controller and a high power processor for advanced functions. The critical flight stack is handled by the real time controller and is decoupled from the user apps enabling fail-safe.
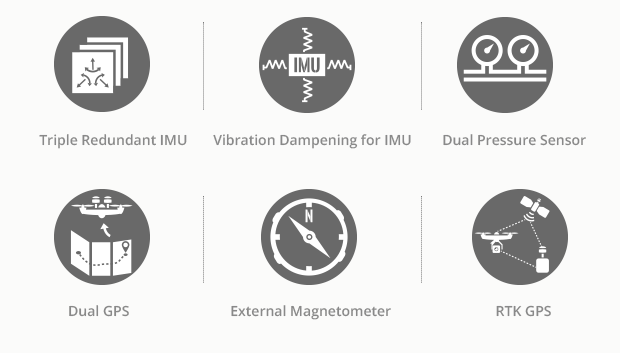
RELIABILITY
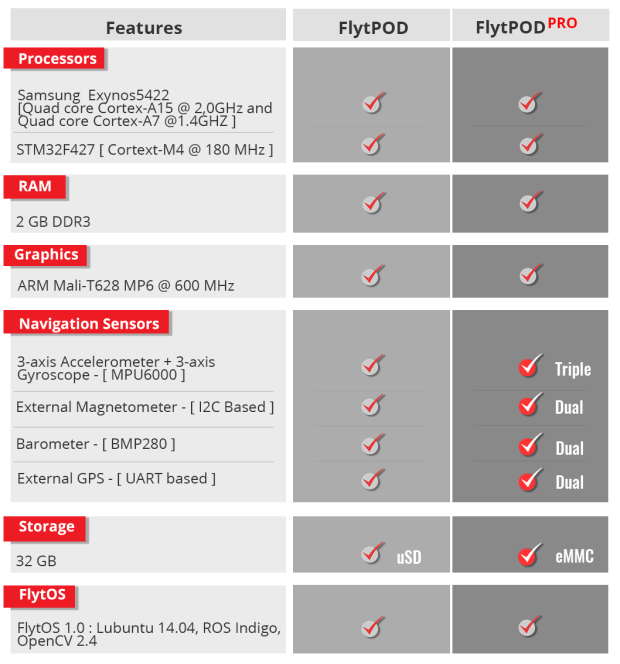
For reliable state estimation, FlytPOD comes with a suspended IMU for vibration damping, an external magnetometer and support for RTK GPS. FlytPOD PRO also offers triple redundancy for IMU, dual pressure sensor and dual GPS for applications requiring higher reliability.
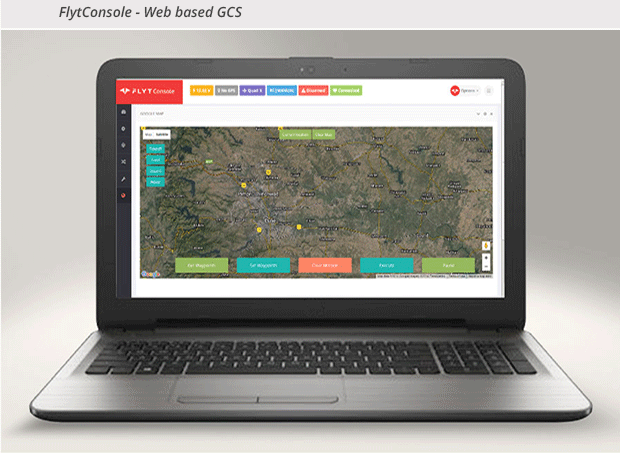
BUILT-IN FUNCTIONS & APPS
Several built-in functions and apps complete the user experience and provide a solid foundation to for your own applications.



The main technical specifications are highlighted below. Click here for a detailed list.
FlytPOD comes fully loaded with all the essentials to get you started with your drone app. For applications that demand higher reliability and superior performance, FlytPOD PRO offers sensor redundancy and faster eMMC upgrades.
Comments
Absolutely! A number of safety features have been built (and thoroughly tested) into the hardware and software design. The basic autopilot (STM32 based) will switch to a pre-programmed fail-safe mode in case of Odroid failure. Either a hover/RTL can be initiated, or the vehicle can be controlled via RC (manual).
Can the vehicle with the FlytPOD still fly if the onboard Odroid crashes?
Thanks James. Just two points:
1) FlytPOD is compatible with Ardupilot stack, as well. Here are the details: http://diydrones.com/profiles/blog/show?id=705844%3ABlogPost%3A2239516
2) The key contribution is FlytOS, the software that powers FlytPOD, and makes is super simple to build, simulate and deploy powerful drone applications (onboard/offboard apps, etc.). We had to build FlytPOD, as FlytOS users were having a hard time setting up their own {Pixhawk/Ardupilot + Odroid/TX1 + Communication} systems. FlytPOD makes it a lot easier to get started.
FlytPOD/FlytOS do come with a set of out-of-the-box applications (github repo: https://github.com/flytbase). No further development is necessary to use any of these apps.
I believe that these type of products appeal more to DIY people and for those this wasn't cheap, just like the Pharos Antenna wasn't (and failed it's campaign too). They are (apparently) good products, but that isn't enough if their price isn't at the right point. Lot's of good products in different areas have gone under because the price couldn't get low enough to justify it.
If it isn't DIY then I think people will look for more integrated things, they don't want to need to mess with things. Like I've written before this guys are doing a great work, but this is more a solution to do development on top of it, not so much something that is plug and play.
Thank you Patrick and Georacer. Appreciate your comments and feedback.
We suspect that most of it has to do with the reputation that Indiegogo has earned over time (I am told that the success rate of Indiegogo campaigns is just about 20%). It would probably have worked better to just collect preorders on our own website :-)
Most other options available today (for flight computers) are way too complicated to setup and use (including those from snapdragon, TX1, etc.). Having used ALL of them, we are quite certain that FlytPOD is by far the easiest to setup. I will be happy if anyone can point us to a better solution :-) FlytOS is designed to work with variety of hardware options, including RasPi3, TX1 and so on. So, as more devices become available, we will be happy to support those, as well.
The good news it that we have enough funds from our investors to continue work on Flyt and to take it to production over next few weeks. We hope to get much better response, once the hardware is readily available.
In the meantime, if you still think that FlytPOD will be useful for your applications, please do support our campaign! We have several offers available for early adopters.
We will be visiting InterDrone over next 3 days. Look forward to meeting several members of this community.
Even though I would like to buy/support this product here are the reasons why I didn't, which might be similar to other peoples:
In the end, I think this is a matter of reputation. Just as we know fully well that Pixhawk and APM2.X work as expected for the intended purpose with no further fiddling, contrary to ardupilot ports in other boards, this family of integrated systems (controller+companion computer+OS) needs to prove its value before people put money onto it without hesitation.
Of course, this is my 2c.
Looking at the end of the campaign , it seem that Gary was right :''I am just afraid there aren't enough serious developers in total to meet your sales goal''.
So, the market for an integrated flight controller, based on an Odroid companion coupled with a ardupilot (of an old generation), is not commercially interesting. The conclusion might rely on different causes , but to me , the most probables are:
A) Most potential prospects have already purchased and experimented with the components proposed in this integration ; This was the case for me.
B) Big expectation from the next generation processors . I am thinking of Snapdragon and Jetson (TK1 & TX1) at an equivalent pricing.
C) No interest in this type of development/environment, looking at the companion computer groups, there is not much activity considering the fact that -according to Chris Anderson - we are over 80k members diyers here...
Hope you will find a niche market and continue to grow :-)
Hello Gary,
Thank you for your faith in what we are building, and for confirming that it is a unique and valuable offering. We hope you see you on our backers' list soon :-)
Regards,
Nitin
Hi Nitin,
I absolutely do not doubt what you are saying, I believe it is a very valuable product that is definitely useful for development of more advanced capabilities.
In fact for what I am doing I will have to use a companion computer in any case.
It may be that this field is growing quickly enough for you to be able to get this funded.
I really hope so because the integration of solid development tools and good hardware are nowhere else to be found.
Towards the end of your funding period if it looks like you are going to actually make it I will probably invest, but from the rate of subscription happening right now, that doesn't seem to me to be likely.
On a Kickstarter project, I am at least guaranteed that if funding doesn't succeed, the money will be returned, but for an open project like this one you receive whatever level of partial funding you have achieved and it may not be enough to fulfill your obligations.
So the buyer is left at the mercy of the outcome of the project.
Guarantees to the contrary previously have often not been fulfilled.
It is a risk I am not willing to take at this time.
Best Regards,
Gary
Hello Gary,
Thank you for your comments, and for sharing your genuine concerns. Having worked with drone-makers and closely looked at their requirements and concerns for a fairly long time now, I strongly believe, we are transitioning from the feature-phone era to smart-phone era in the drone world. Basic automation is a solved problem. It is good for hobby flying, but does not get you anywhere beyond that. The moment you need to use a drone for anything serious, you start realising the limitations of the basic systems. You need to integrate your custom business logic (custom apps), provide custom UI, make swarms work, provide image-processing capabilities, stream rich data, provide authentication, security, ability to connect advanced payloads, and so on. All this is just not possible with the traditional systems.
There are some off-the-shelf drones that provide some advanced features, today. However, they are quite rigid, and do not provide a framework or capability for drone-makers/developers to build their own custom applications.
The market size is going to be pretty much as big as the number of people building anything beyond a basic flying system (for hobby/fun). This is a big number and is growing very fast / exploding!
BTW, it is always possible to still use this advanced system like a traditional system (like, you can use a smartphone to just place calls and send text, if you like to).
If you find the product interesting and useful, I urge you to please go ahead and support the campaign! Leave the rest to us :-) It is our responsibility to make sure that all backers are delivered a professional product in the committed timeframe.
There have been projects on KickStarter/Indiegogo, where they were still at the idea/conceptual phase, when they were launched (high risk). However, in this case, the beta program has already been conducted for over 3 months. The sample-codes are available. Detailed product and API documentation is in place. Flight videos and tutorials are there. Forums are active. Major risks have been mitigated. The testimonials are there for you to see.
It would be a shame if you really find the product impressive, but decide not to back us in time, for the fear of failure. We need your support now! Give us a chance.
-
1
-
2
-
3
of 3 Next