I thought people here might be interested in a project that I’ve been working on for a while.
There are no affordable extended duration underwater exploration projects and I’ve developed a hardware platform to provide this capability. The glider uses a mixture of 3D printed components and commodity parts (such as the Blue Robotics tubing/end-caps/serial communication boards).
The model is viewable on the Onshape online platform here (requires webGL)
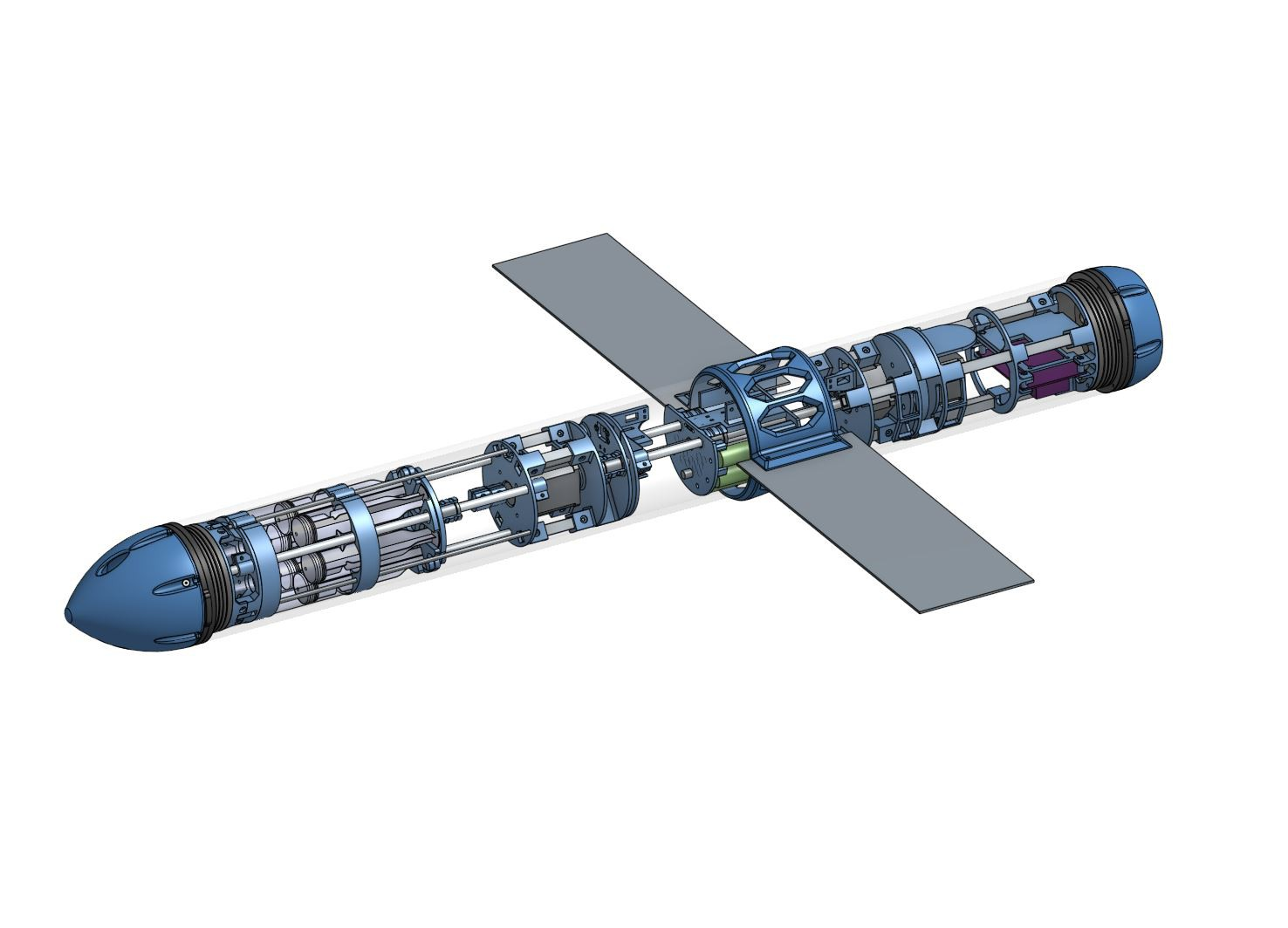
The glider is fully open source and assembled using parameterisable 3D prints (to adjust parts for your printer to minimise post processing). Instructions are available, with a level of detail that if you're able to assemble a RepRap kit, you should be able to assemble the glider. The only tools required are a 3D printer, soldering station, dremel and then various hand tools such as hacksaw/allen keys etc.
With the Onshape CAD model, you are able to duplicate the model and adapt the hardware for your own requirements (such as adding a front mounted camera) - the glider is designed to be a hardware platform for others to use/adapt, not a project with a fixed use case.
The current software is relatively basic (primarily used to demonstrate the glider ascending/descending underwater), but the control board does have an IMU, allowing for for the addition of a PID algorithm to control glide angle. The control board can also act as a slave board motor controller for the Pixhawk autopilot board and this would integrate with the Mission Planner software in order for the glider to perform autonomous waypoint navigation.
More information can be found on the glider's Hackaday page and any comments/suggestions are more than welcome.
Comments
+1 John Arne Birkeland
Best example of a true open-source/DIY spirited project I have seen in a long time.
This is fantastic! Thanks for sharing!
This is brilliant, great work and thanks for sharing - now I need to get my 3D printer up and going.
Really great innovation and excellent execution.
A truly novel design, high efficiency propulsion solely by ascending and descending.
Seems to me this might be combined with one of the the wave or solar powered self propulsion boat methods for really long distance or long duration data gathering voyages.
@John Moore, Currently the glider can operate for about 6 hours (~4km if you extrapolate upon current speed/glider characteristics), however the current glider version has the stepper motors powered constantly and therefore does not benefit from only switching gliding states occasionally. Now that the general hardware is done I will look at optimising power usage and getting a greater endurance (switching gliding states less frequently also increases speed and therefore range).
How much endurance are you getting?
Awesome work Alex! Congratulations
Fabulous!