Hello Everyone,
I want to share a project I have been working on for the last year. It is a quadcopter controller with full Linux support (maintained using buildroot)
This means:
- full networking support (Wifi, Bluetooth)
- use scripting or any programming language you want
- SSH, Busybox, and hundreds of other tools
- compile your own additional tools
- video4linux/camera (when using capable board - i.e. Odroid-W or RPi)
- anything else Linux supports
The controller's features currently are:
- Support for quadcopters in X configuration of any size
- 2 fly modes - Auto-level & Acro
- Altitude hold
- learner mode (attach 2 controller simultaneously - one for the teacher and one for the learner)
- fast (boot time of around 2-3sec)
- WWW configurable (i.e. you can adjust anything using your phone in the field)
- Camera support for taking pictures and videos
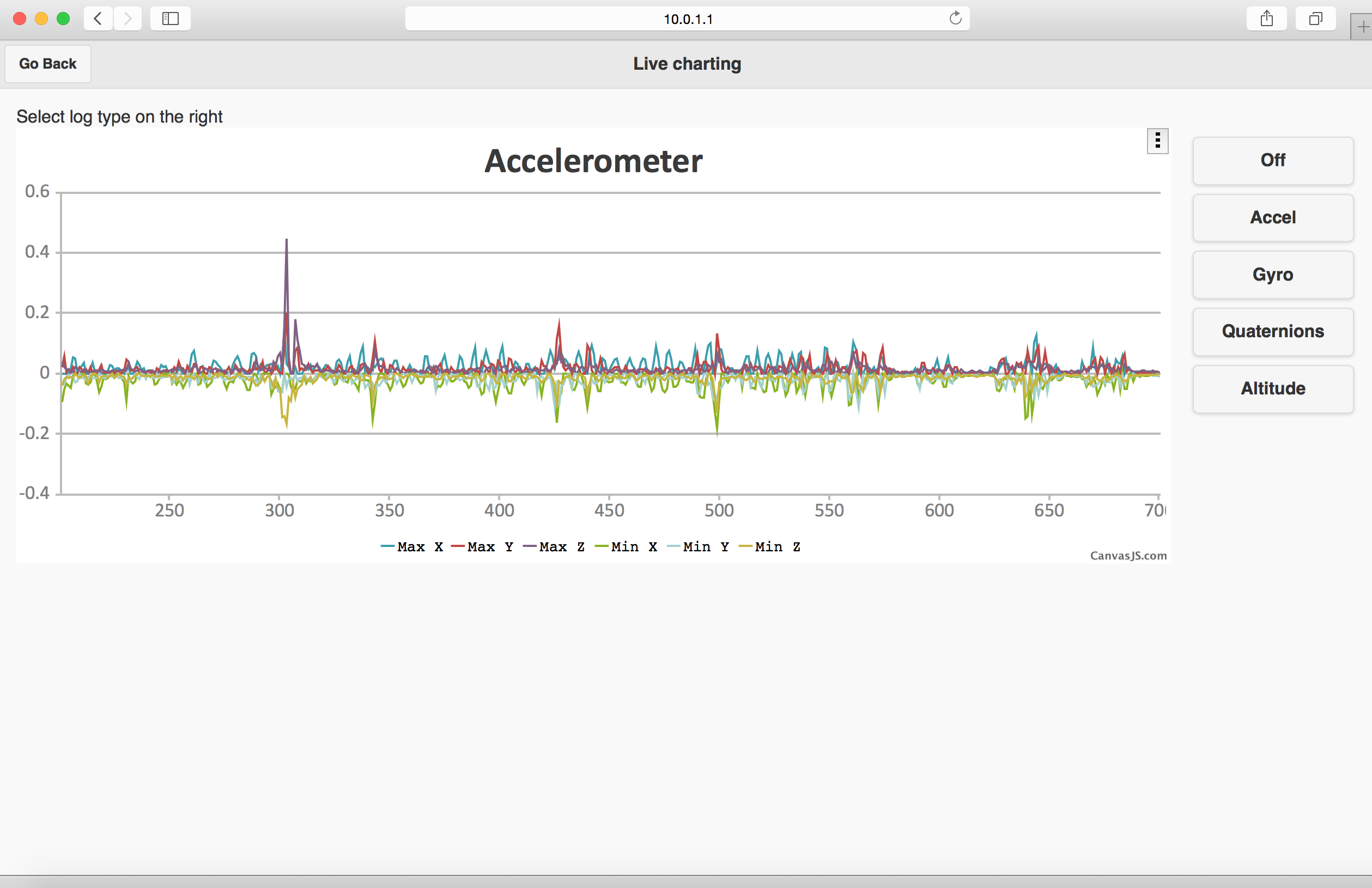
- Live and Offline log charting (vibrations, quaternions, altitude, etc)
- Out of box bluetooth (PAN) and WIFI connectivity for receiving flight logs, accessing the file system (NFS and SSH), browsing videos and pictures
- Endlessly and easily extensible
The setup is relatively simple and includes 2 boards - AVR board (like Arduino Pro Mini) and SPI capable SBC (like Odroid W or RPi) wired together using SPI.
With the software provided the setup is of plug-and-play and you can control your quadcopter using PS3 controller or via network.
See the wiki for more information.
Sources: https://github.com/rpicopter/AvrMiniCopter
Wiki: https://github.com/rpicopter/AvrMiniCopter/wiki
Precompiled images: https://github.com/rpicopter/AvrMiniCopter-images
If you passionate about linux and quadcopters than this is something you should try! :)
Let me know if you have any questions.
Thanks,
Gregory


Replies
To day I test fly Rpicopter it look good. But I am not sure to use altitude hold.

This is photo chart for barometer. I can not use barometer.
To ease barometer errors you will need to protect it from direct sunlight and wind.
You can also adjust Baro constant in the WWW. Take a look at the Altitude section in the WWW. By default it is 500. The higher the less significant Baro reading is.
Which controller are you using, are you using PS3 connected to Android device? or PS3 over bluetooth?
For android + PS3 check: https://github.com/rpicopter/AvrMiniCopter-Android/wiki/Controls
For PS3 over bluetooth check: https://github.com/rpicopter/AvrMiniCopter-PS3/wiki/Controls
I use PS3 over bluetooth. I understand to use button. But I am not sure to use altitude hold mode because barometer have altitude overshoot more.
Do you use raspberry pi for controll altitude hold mode?
AvrMiniCopter vision is to be a minimalistic controller that can be wiried with other devices like RPi. On RPi you can use kernel modules to read barometer, gps or any other devices.
Why you don't use arduino reads barometer?
-
1
-
2
-
3
-
4
-
5
of 6 Next