Hello Everyone,
I want to share a project I have been working on for the last year. It is a quadcopter controller with full Linux support (maintained using buildroot)
This means:
- full networking support (Wifi, Bluetooth)
- use scripting or any programming language you want
- SSH, Busybox, and hundreds of other tools
- compile your own additional tools
- video4linux/camera (when using capable board - i.e. Odroid-W or RPi)
- anything else Linux supports
The controller's features currently are:
- Support for quadcopters in X configuration of any size
- 2 fly modes - Auto-level & Acro
- Altitude hold
- learner mode (attach 2 controller simultaneously - one for the teacher and one for the learner)
- fast (boot time of around 2-3sec)
- WWW configurable (i.e. you can adjust anything using your phone in the field)
- Camera support for taking pictures and videos
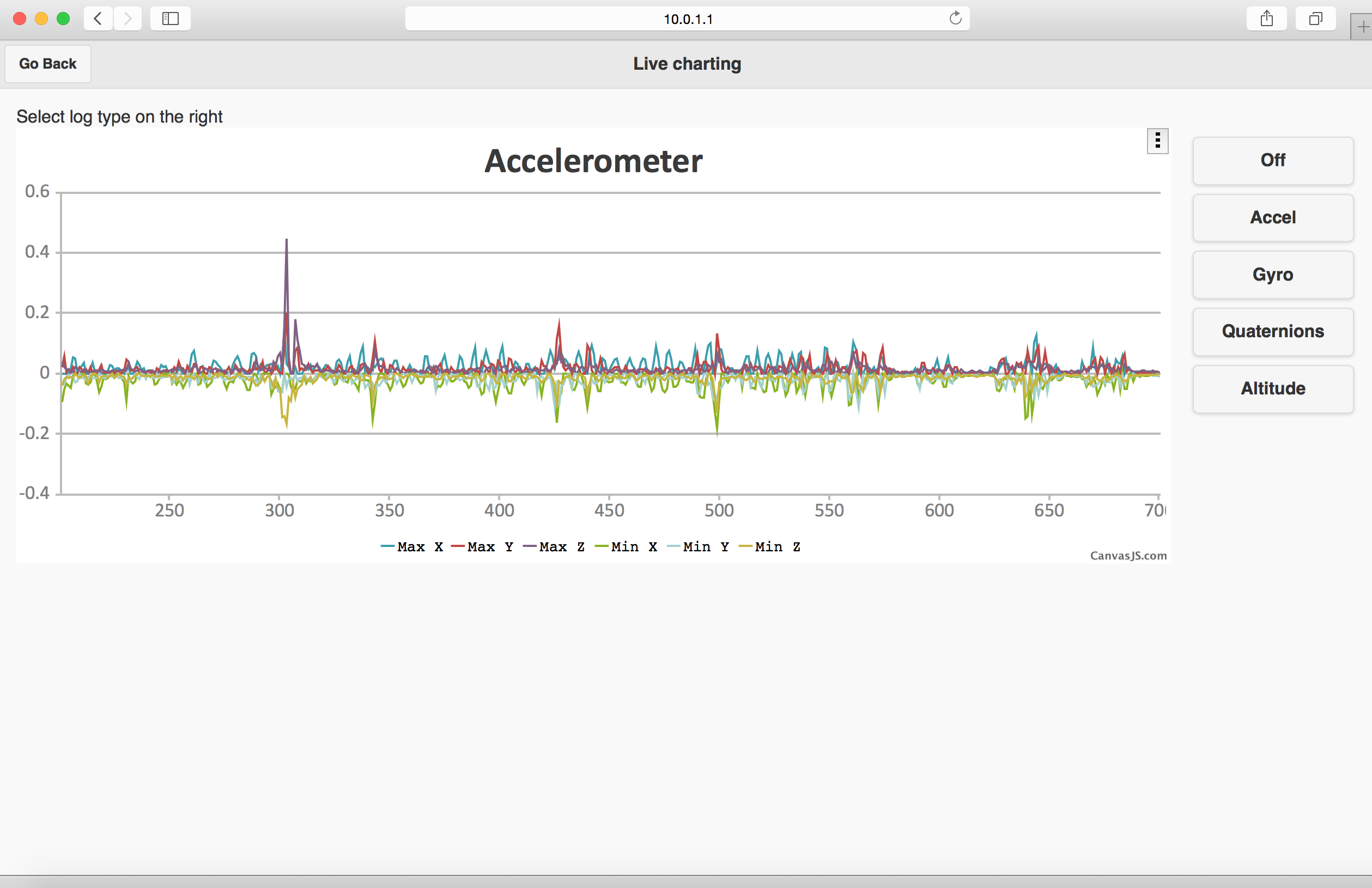
- Live and Offline log charting (vibrations, quaternions, altitude, etc)
- Out of box bluetooth (PAN) and WIFI connectivity for receiving flight logs, accessing the file system (NFS and SSH), browsing videos and pictures
- Endlessly and easily extensible
The setup is relatively simple and includes 2 boards - AVR board (like Arduino Pro Mini) and SPI capable SBC (like Odroid W or RPi) wired together using SPI.
With the software provided the setup is of plug-and-play and you can control your quadcopter using PS3 controller or via network.
See the wiki for more information.
Sources: https://github.com/rpicopter/AvrMiniCopter
Wiki: https://github.com/rpicopter/AvrMiniCopter/wiki
Precompiled images: https://github.com/rpicopter/AvrMiniCopter-images
If you passionate about linux and quadcopters than this is something you should try! :)
Let me know if you have any questions.
Thanks,
Gregory


Replies
Hello Gregory D.
I want to compile your code with myseft. Can you tell me step by step to do it. Do I make buildroot before?
Depends on what exactly you want to do. Check the AvrMiniCopter architecture: https://github.com/rpicopter/AvrMiniCopter-wiki/wiki/Design
If you want to hack the code that controls the quadcopter then you only need Arduino IDE. However if you want to recompile the Raspberry Pi/Odroid image then you need buildroot.
I test fly on level mod it not yet stable.
Yes I ever fly with Multiwii, Arducopter, naza.
Now I adjust acro and stab PID to very stable.
But it can't adjust realtime after adjust PID must to unplug and plug power it will work.
You can adjust PID realtime through 'WS Debug' or through command line.
Just send a command with the new PID value, for example:
'112 500' to set rate pid Kp to 500 for pitch
For the full list see lines 279-311
https://github.com/rpicopter/AvrMiniCopter-Arduino/blob/master/AvrM...
where:
pid_r - rate pid for yaw, pitch, roll
pid_s - stab pid for yaw, pitch, roll
Hello.
How to use WS Debug.
You just need to send a command. List of commands is in the help on the screen. You might also want to clear the filter there.
I do not test with altitude hold yet. I will post vedio soon.

This photo baro in the bottle caps.
In the next weeks I will be submitting a new version where you can use althold to self start and self land.
-
1
-
2
-
3
-
4
-
5
of 6 Next