Hello Everyone,
I want to share a project I have been working on for the last year. It is a quadcopter controller with full Linux support (maintained using buildroot)
This means:
- full networking support (Wifi, Bluetooth)
- use scripting or any programming language you want
- SSH, Busybox, and hundreds of other tools
- compile your own additional tools
- video4linux/camera (when using capable board - i.e. Odroid-W or RPi)
- anything else Linux supports
The controller's features currently are:
- Support for quadcopters in X configuration of any size
- 2 fly modes - Auto-level & Acro
- Altitude hold
- learner mode (attach 2 controller simultaneously - one for the teacher and one for the learner)
- fast (boot time of around 2-3sec)
- WWW configurable (i.e. you can adjust anything using your phone in the field)
- Camera support for taking pictures and videos
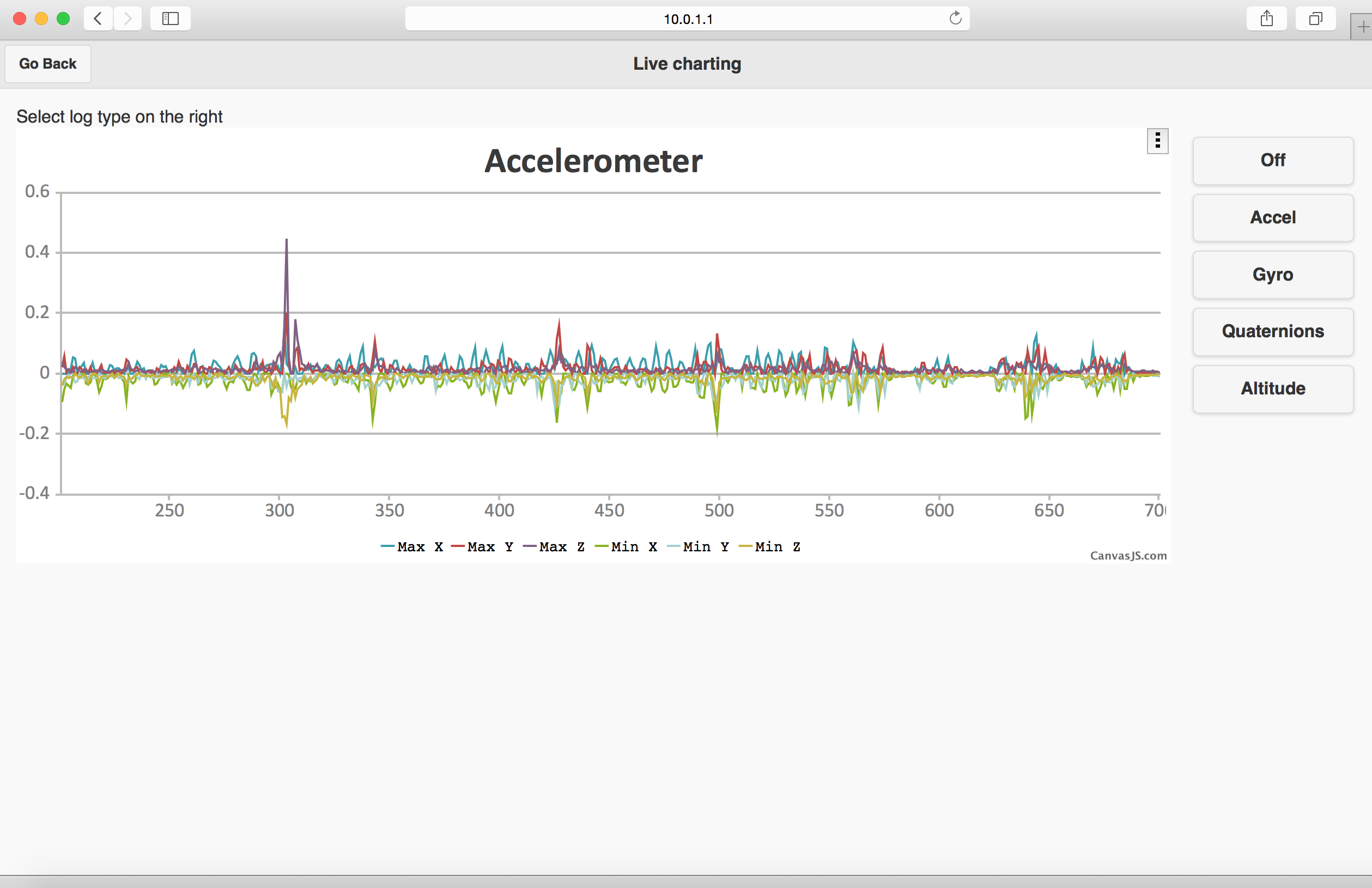
- Live and Offline log charting (vibrations, quaternions, altitude, etc)
- Out of box bluetooth (PAN) and WIFI connectivity for receiving flight logs, accessing the file system (NFS and SSH), browsing videos and pictures
- Endlessly and easily extensible
The setup is relatively simple and includes 2 boards - AVR board (like Arduino Pro Mini) and SPI capable SBC (like Odroid W or RPi) wired together using SPI.
With the software provided the setup is of plug-and-play and you can control your quadcopter using PS3 controller or via network.
See the wiki for more information.
Sources: https://github.com/rpicopter/AvrMiniCopter
Wiki: https://github.com/rpicopter/AvrMiniCopter/wiki
Precompiled images: https://github.com/rpicopter/AvrMiniCopter-images
If you passionate about linux and quadcopters than this is something you should try! :)
Let me know if you have any questions.
Thanks,
Gregory


Replies
I see your vedio fly on altitude mode very good. Perface.

I read this.
Q: How do I connect over bluetooth
AvrMiniCopter implements Bluetooth PAN networking.
For security reasons you will need to enter your client device MAC address into /etc/wireless/pin
Reboot and retry.
I want to know how to edit /etc/wireless/pin?
And what wifi usb you use?
Ok...Thank you. I will test compile your code.
Hi,
To edit the /etc/wireless/pin you have 2 options:
- take the SD card and plug it to a different computer to edit this file
- use a serial connection to your RPi: http://elinux.org/RPi_Serial_Connection
I do not have RTL8188CUS to test.
I have used atheros AR9271, realtek RTL8187L and ralink rt5370 which i am currently evaluating.
Ok...... Thank you. I will buy it form this site.
http://www.arduitronics.com/product/169/usb-2-0-wifi-dongle-for-ras...
Hi, I can confirm that ralink rt5370 works fine.
Hi Gregory D
So I will buy ralink rt5370.
Yes I plug wifi dongle and reboot quadcopter but still can't found Ad-Hoc hotspot appear.
I check with lsusb command it show this RTl8188CUS 802.11n.
I can dmesg.
Thank you.
How to connect over wifi?
I can't scan found Ad-Hoc hotspot of rpicopter.
I use this usb wifi.
http://www.arduitronics.com/product/231/nano-usb-wifi-dongle-edup
-
2
-
3
-
4
-
5
-
6
of 6 Next