Hi colleagues,
I've pass the fly_gps_glitch_loiter_test from autotest arducopter suite, on a SITL running in local mode. This test, applies 5 gps glitches, using de SIM_GPS_GLITCH_* param.
I am trying to detect the effects of the glitches analyzing records from tlogs, but I don't know which value I must check out.
Regarding Ardupilot wiki "Diagnosing problems using Logs" (gps glitches topic):
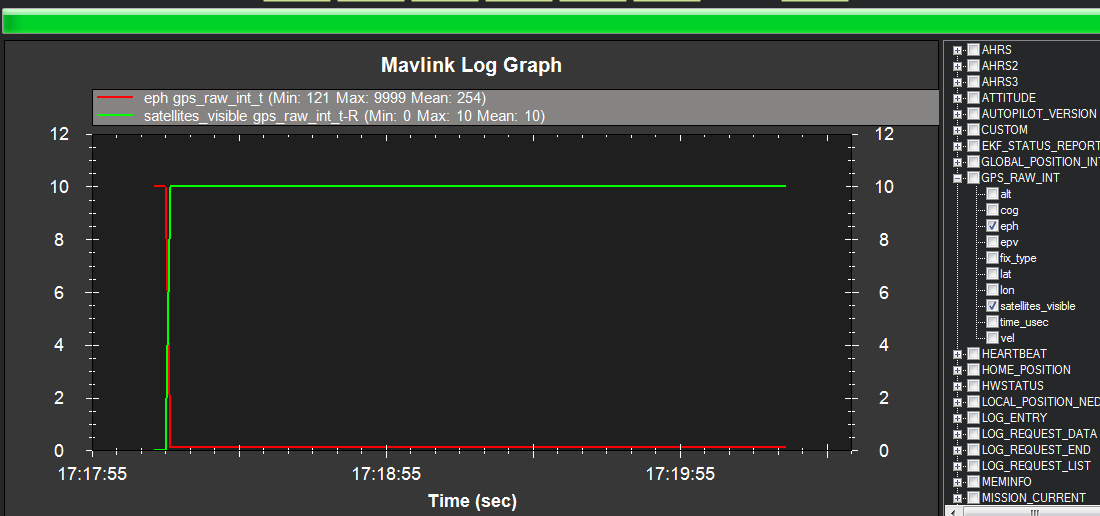
values from GPS_RAW_IT group’s “eph” and “satellites_visible” should vary, but they stands stable.
Also, I've checked Youtubes "GPS Glitch Protection" video , and he speaks about a three-dimension GPS position value (GPS , actual and inertial ¿may these values be helpful?one).¿Are these values provided on tlogs?
Anyway, when I ran the same test, the distance variations are 1 at most ...
Any help would be really useful....
(By the way, is there any doc related two Arducopter-mavlink values's meaning ang how can be interpreted¡? :( )
Replies
Hey Ivan ¡¡
Could you be so kind to detail me what concrete values ?
I want to analyse some info from telemetry, from a problem that can be simulate with SITL, Do you have in mind another posibility ?
Thanks for answering.¡¡
Ivan R said: