This is my rocket project. I intend to vertically land my rocket via an octocopter. The rocket nose will be a 5.38" . The all up weight so far is about 3700grams. The rocket will most likely be propelled by an "I" motor.
I have a Pixhawk for flight controller.
Also just in case your worried about 400agl, it will probably fly to about 1200-1500ft. It will be flown under NAR's rules which cover this craft and we will have a 10K airspace clearance/waiver from the FAA when it flies.
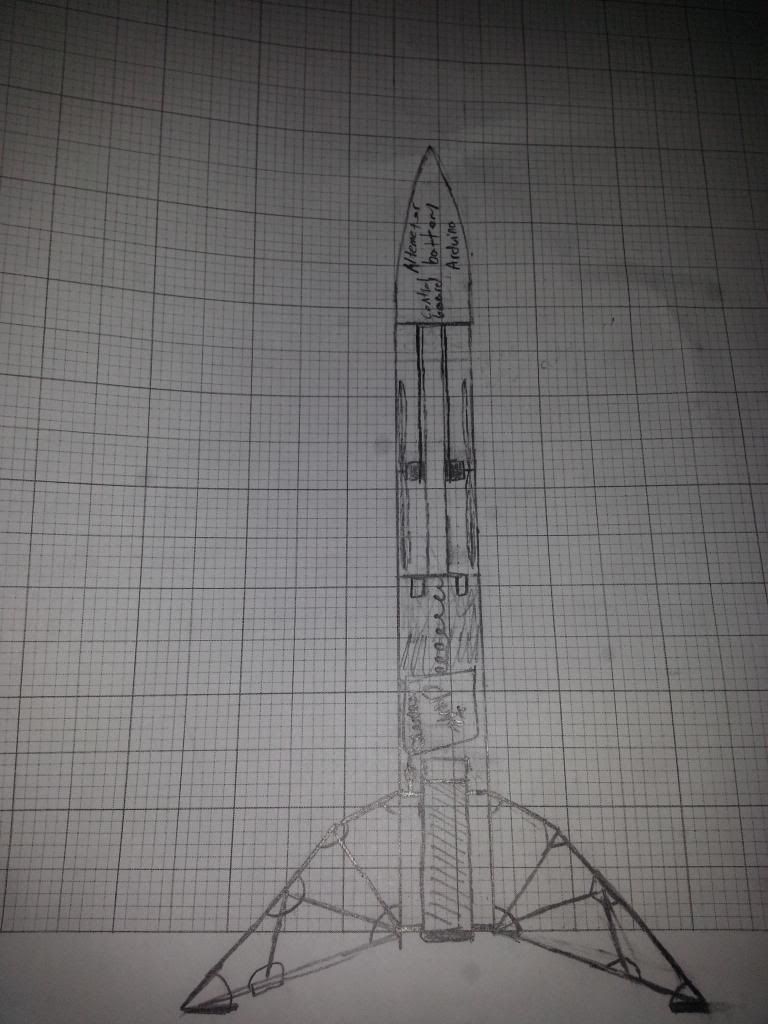
This was the original plan, but I decided it was going to be too heavy with this design. It was going to be a 4" wide rocket. I had planed on quad motors with this design. I ended up completely changing the design:
Velocity VL-1.0
Velocity VL-1.1
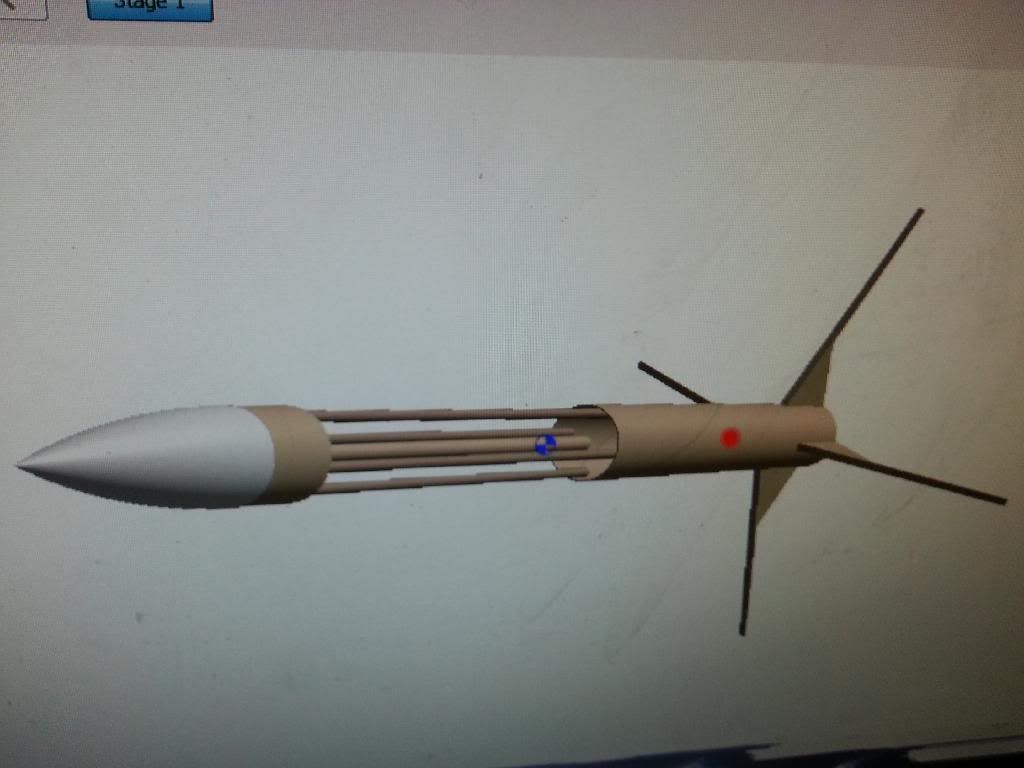
I decided to make it more compact, but wider and changed to a 5.38" body for the rocket. This made things much better as far as weight goes, but the problem was I was pushing the limits of the weight with a quad configuration(or over what I wanted it to be at least):
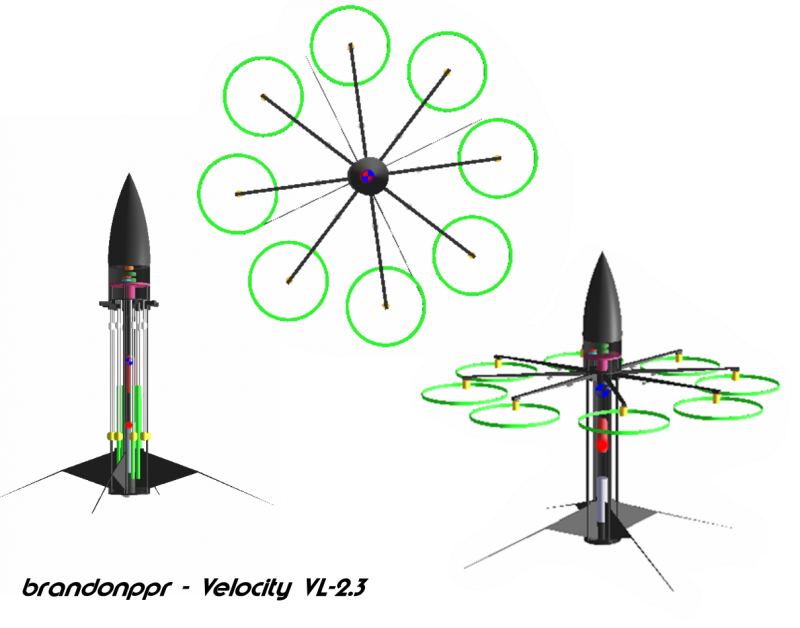
Velocity VL 2.0:
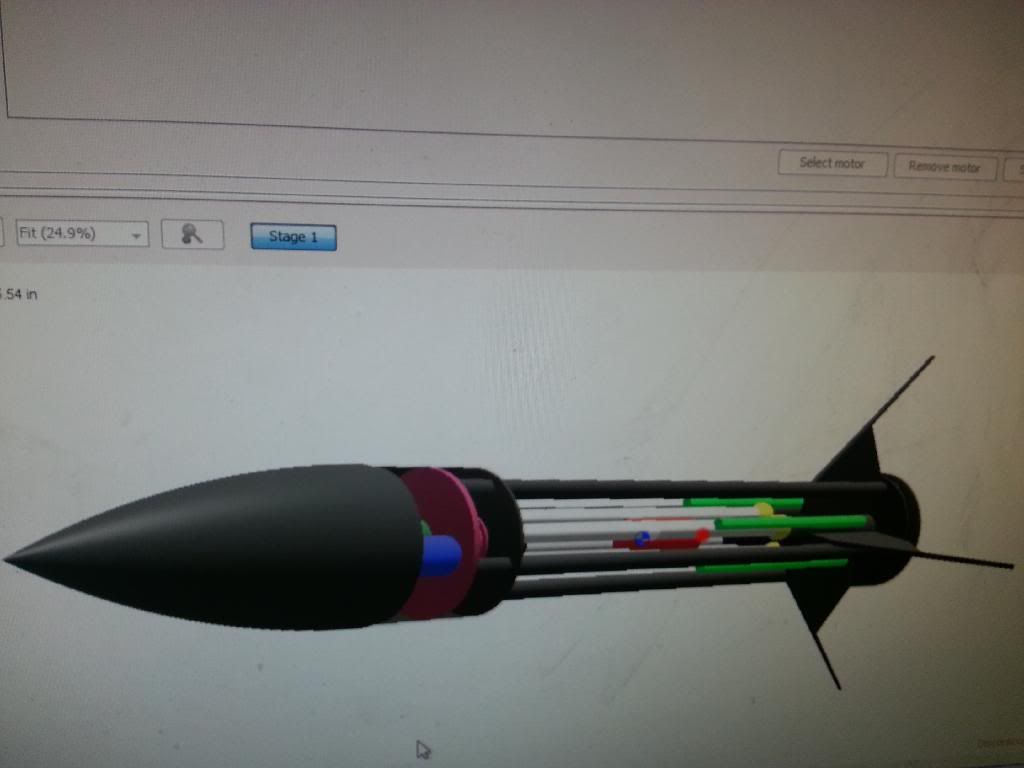
Here, I decided to change to Octo configuraton and face the props down to tuck them in the rocket body. This example is with 11" props, but I have since decided on 12-6 props and shortening the arms. Also I decided to go with a small size motor than in the pics below.
Velocity VL 2.2
Here is a model with arms retracted and extended. The center of gravity moves to just below the props when arms are extended:
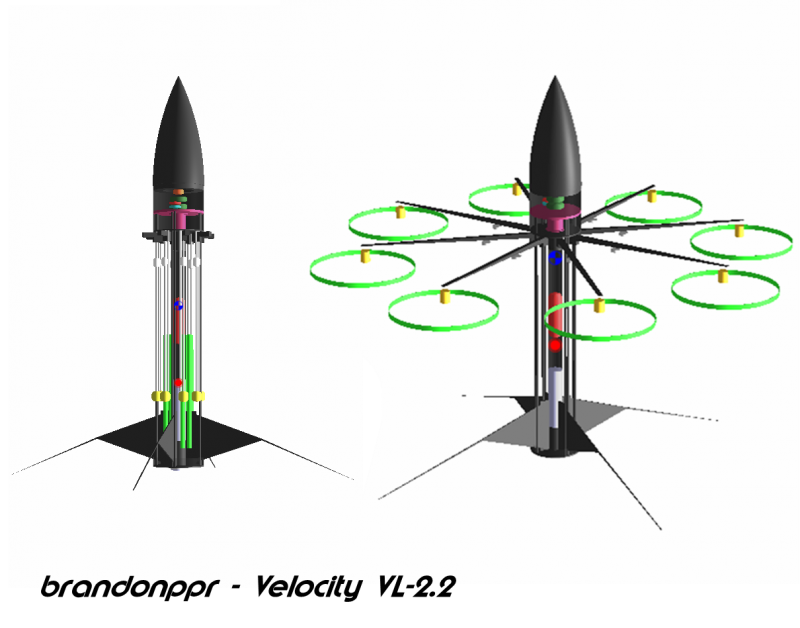
I plan on this being automated and some programming will need to be done
Here is a rough outline of what I want my code to do. I want the arms to deploy before apogee so that it is not falling before the motors start. That way it has a chance to stabilize while it is still pointing somewhat upward.
Anyway this is what I had in mind:
If mph is >30 and then is <5mph(only do this once)
------Deploy quadcopter arms
------Apply x% throttle for x seconds
------------If all 4 arms do not fully deploy
-----------------Cut power to all motors
-----------------Delay x seconds
-----------------Deploy parachute
------------Else/otherwise
-----------------Fly to predetermined landing spot
-----------------Land
-----------------Cut power to all motors
If mph is >15mph after applying x% throttle for x seconds
------Cut power to all motors
------Delay x seconds
------Deploy parachute
Here is an updated version:
Building a scale version to test flight characteristics of the rocket itself. Rocket was built in OpenRocket and shows to be stable, but I want to test because of the do design.



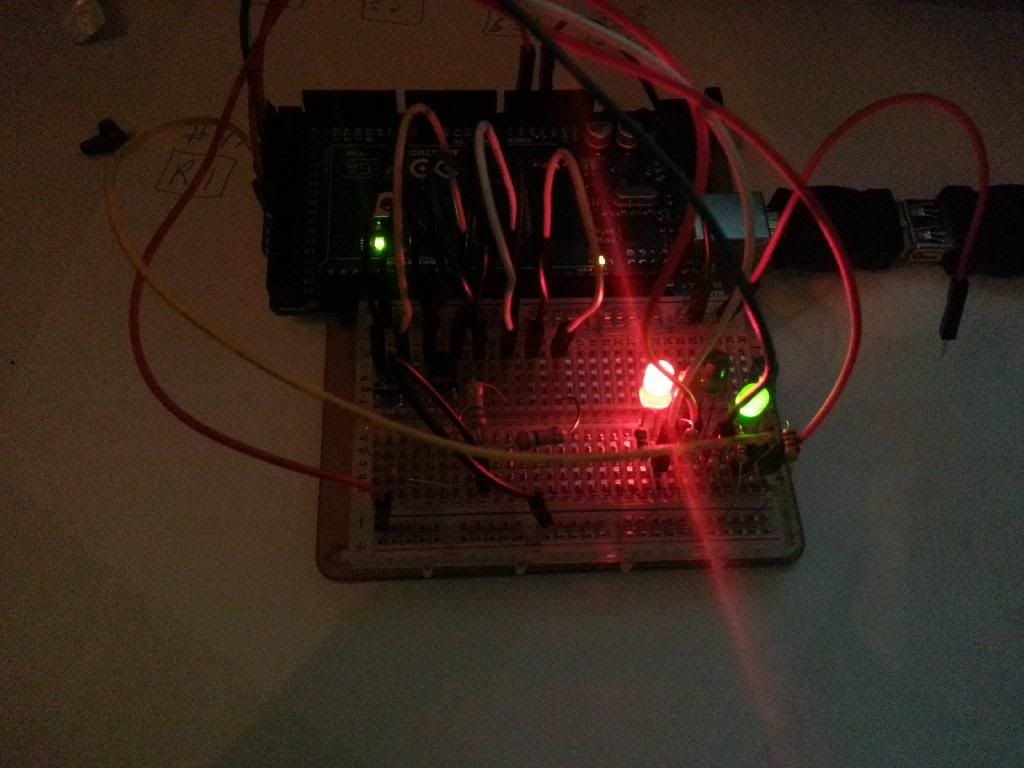
I wrote my code for Arduino last night. I built a prototype on my solder-less breadboard this evening. With a little tweaking of my code, I got it to work as desired, lighting up LEDs in place of the functions for now.
My daughter painted the part of the scale version I have completed for me. I am still waiting on a few things to complete the scale version.

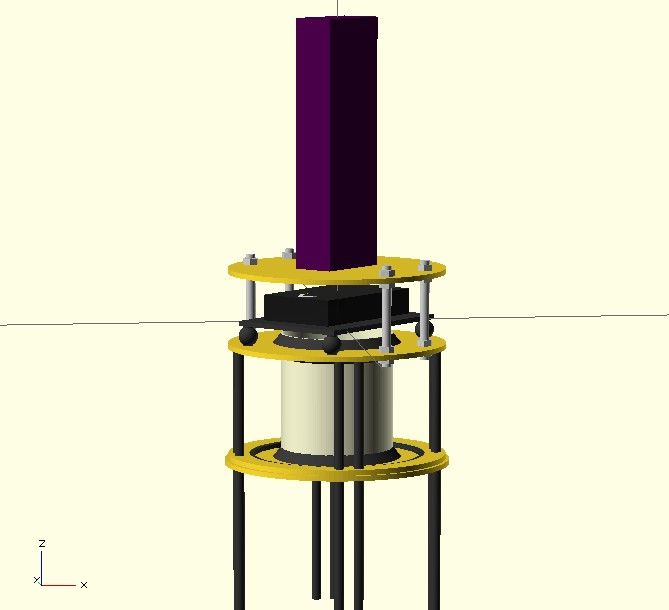
I have started on designing the AvBay. Everything past the top platform in the pic below will be inside the nose cone. I still have a ways to go to finish, but here is what I have so far.
The purple is the battery and the black rectangular prism is the flight controller (3DR Pixhawk).
I am using OpenSCAD to design the AvBay.
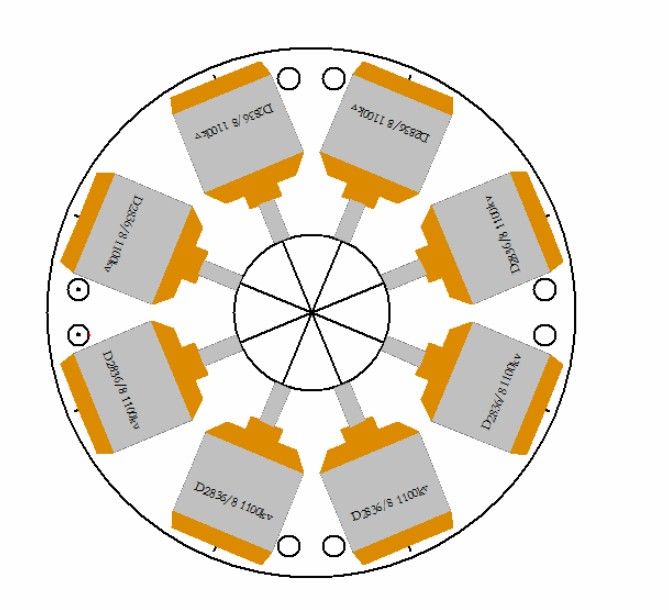
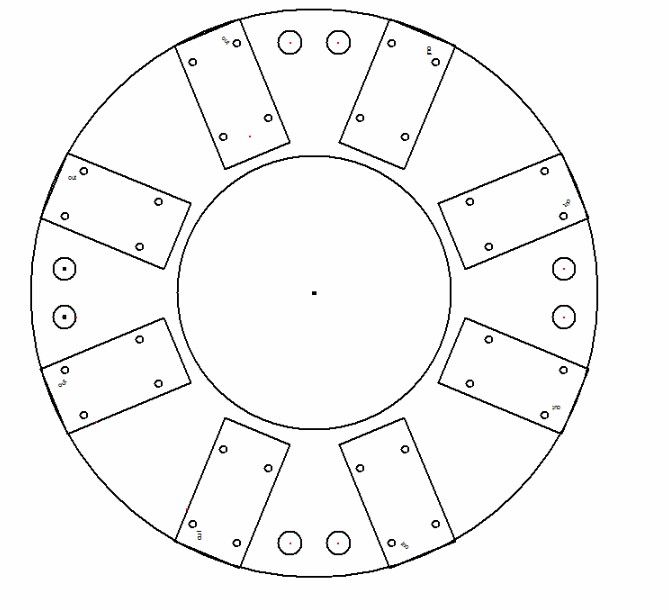
The second pic is the template for mounting the retracts to the lower centering ring of the AvBay.
The third pic is the motor position looking toward the aft centering ring.
I'm using DeltaCad to design the templates for the rings.
Replies
These are not the booms I will be using, but I wanted to see what it looks like with booms on it:
Kudo's Nice project!!
I have made some progress. I cut some of my centering rings and test fit the retracts.
I meant to weigh without the retract. It would be 50g

Testing with Arduino

Inside a retract

Retracts in action:
Can you make it lighter?
Can you jettison the spent engine?
Have you considered/calculated for fewer props? Why octo?
Have you considered a mini aprs?