Today I'm beginning the thought process in earnest towards building a 3rd generation frame for my quadcopter, I'd love to know your thoughts on potential ideas, flaws, etc. I'd be happy to try and document the build-up here over the next week or so as I get it together.
~My first iteration was the 3DR quad - enough to get me off the ground & learn basics, but a somewhat fragile frame & expensive to fix.

~Second iteration was a homebuilt 3/4" aluminum arm tubing based design with aluminum sheet, plexi, nylon motor mounts and rivets as most fasteners.



Version 2 had an unfortunate crash where at very low RPM, during fast descent, one of the motors locked up & couldn't overcome the relative wind - the other 3 motors spun up, as the locked one screamed (siezed) resulting in a death spiral to ground (topic for another thread! - what brushless motors can overcome reverse relative wind from low power?).
...So, I'm ready for something new. Of course it needs to be at once strong, light, easy to fix, build, and find parts for. I have a lot of bike parts and raw aluminum & other metals.
Enter: The Bike Wheel. I have several floating around the garage/shop. And it seems like a sweet compromise of strength & lightness... with only a few spokes necessary to hold a central electronics/battery hub taught. Here's a mock-up sketch:
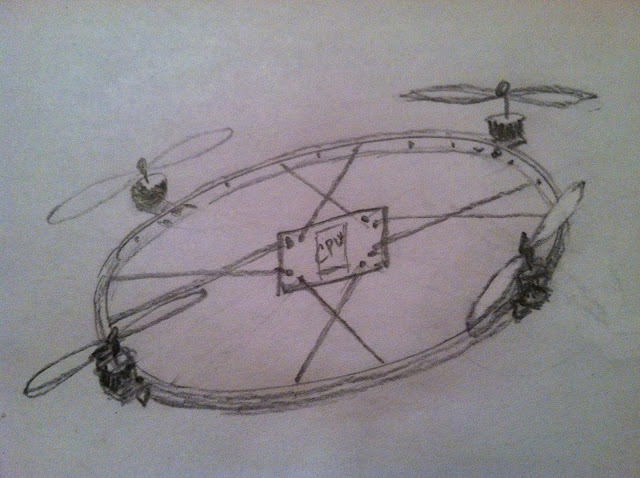
Each motor would be mounted with one M4 screw with a locknut through one spoke hole with an "L" bracket of 1.25"x.125" aluminum. I had some angle aluminum laying around so I just trimmed up a piece and it could look like this. I imagine I'll need to simply cut some grooves to accept the bottom of the rim and keep the angle bracket square to the rim (green line):


What do you think? Has anyone tried this? Images/links/videos appreciated!
My version 2 was 24.25" from prop hub to prop hub. This version would be approx 24" (mountain bike wheel diameter is 22.25"D). If I decide to move to a Hexa (6) prop copter I could simply scale it up with a road bike rim (24.5" OD - ~25.75" prop-prop).
Bike wheel rim weights can vary wildly. Mine is pretty heavy (extremely strong/rigid) at 440 grams - but it's free, in the garage. Much lighter ones exist for pennies at the bike recycler in Santa Rosa.
Big question for me is if I put a plate in the middle (see sketch) - will it resist oscillation? Will it have some undesirable harmonics? Maybe even desirable isolation? What might be the best mounting object to use in the middle (mount battery, APM, telemetry, camera gyro, etc)? A plate of aluminum with spoke holes drilled? a tiny plate of steel to tense spokes a lot?
Appreciate any feedback you might have for me - and thanks in advance!
~jake
Replies
No clue about most of your questions, but I think this is brilliant. I suspect you will get a fair amount of high frequency vibration transmitted to teh centeral plate - I would isolation mount the boards for the electronics.
When I used to build telescopes, I used piano wire spiders to hold the secondary mirrors and they wre very stable and low vibration. This is sort of similar.