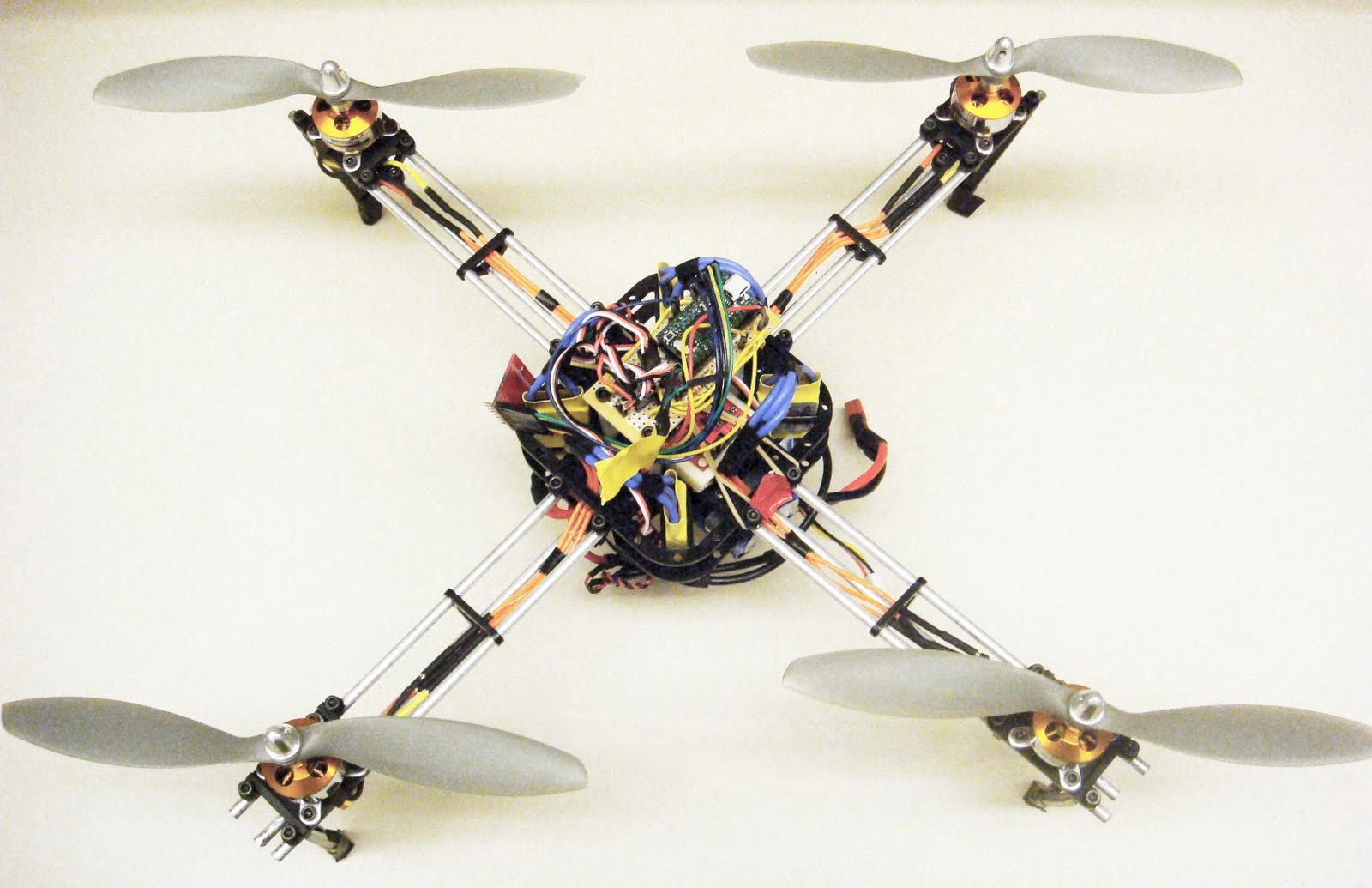
For a class project, we built a quadrotor using the Sparkfun Razor IMU and a Atmega32U4 running the PID controls. After about a month of work, we successfully flew it with great results (alright, it wasn't super stable, but it stayed up!). Check it out at www.wyvernupenn.blogspot.com.