My TMR-FC Flight Controller
- Frame
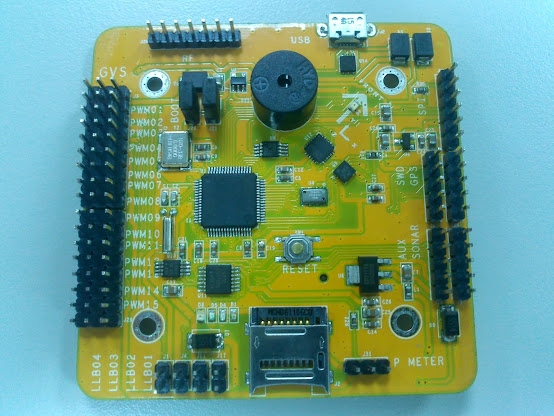
- Controller

- Introductions
1. User Guide :
2. Sechematic :
3. Gerber :
4. Software :
The software is Porting from "PX4".
https://github.com/cctsao1008/TMR
- Hardware Features
1. MCU :
STM32f405RG
2. AHRS :
MPU6050, HMC5883, MS5611
3. Features :
12 channels PWM output, one PPM input and one Futaba S.BUS input,
Built-in 10 DOF, 5 LEDs ( controlled by PCA9533/9536), GPS port ( UART / I2C),
Auxiliary SPI and GPIO, RF port (APC230 or BT), LiPo Voltage measure via ADC,
Beeper for tone alarm, SWD port, SONAR, USB VCP and MSC, Micro SD ( can be read via USB),
Light Bar LED control, Internal FLASH EEPROM emulation using sector 1, 2 and 3 ( 16KB x 3 ),
RTC ( power keep by 3V CR1220 )
....... etc
4. Stress Test VB scripts :
Auto re-boot loop test, tone alarm loop test, ..... etc
5. Support PX4 Qupgrade tool :
- Tests :
---------------------------------------
- Boot Log :
---------------------------------------
reboot
ABCDF
nsh_romfsetc: nsh > romfs_img_len 0xFF52F09C
nsh_romfsetc: nsh > Mounting ROMFS filesystem at target=/etc with source=/dev/ram0
[boot] Initializing (HRT) 1...
[boot] Initializing (CPU) 2...
[boot] Initializing (DMA) 3...
[boot] Initializing pca953x driver
[PCA953X] on I2C bus 2 at 0x62
[TMRFC_LED] led_off, led = 0x338
[TMRFC_LED] led_off, led = 0x332
[TMRFC_LED] led_on, led = 0x334
[boot] Initializing soft SPI for the MMC/SD slot
[boot] Successfully initialized soft SPI for the MMC/SD slot
[boot] Binding soft SPI device to MMC/SD slot 0
[boot] Successfuly bound Soft SPI device to MMC/SD slot 0
[boot] Initializing SPI3
[init] MODE = autostart
[init] Looking for microSD...
[init] Card mounted at /fs/microsd
[init] tone_alarm start
[init] Reading /fs/microsd/etc/rc.txt
Detecting on board sensors on I2C bus(I2C2) ......
( 0x62 ) Have PCA9533DP
( 0x41 ) Have PCA9536DP
( 0x69 ) Have MPU6050
Set MPU6050 auxiliary I2C bus to bypass mode......
Detecting sensors on MPU6050 auxiliary I2C bus......
( 0x1e ) Have HMC5883L
( 0x77 ) Have MS5611
i2c: Done
[init] Start the ORB
[uorb] ready
ramtron: RAMTRON not enabled, skipping.
param: selected parameter default file /fs/microsd/params
[init] param load /fs/microsd/params
param: end of parameters
[init] Start mavlink ( 57600 /dev/ttyS1 )
mavlink: MAVLink v1.0 serial interface starting...
mavlink: DOWNLINK MODE
mavlink: UART is /dev/ttyS1, baudrate is 57600
[init] Start commander
commander: starting
commander: No RGB LED found
[fcservo] default PWM output device
<fcservo> MODE_NONE
[fcservo] starting
<fcservo> adjusted actuator update interval to 100ms
FC driver (no PWM) started
[init] Start sensors >> need to implement
[init] Start one of the estimators ( attitude_estimator_ekf ) >> wait for MPU6050 driver ready !!
[init] Start GPS >> need to implement
NuttShell (NSH)
nsh> eeprom test
---------------------------------------------------------------------------------------
RM0090 Table 5. Flash module organization (STM32F40x and STM32F41x)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08000000, SE = 0x08003FFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (986):Check_Sector_Erased 0 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08004000, SE = 0x08007FFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (988):Check_Sector_Erased 1 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08008000, SE = 0x0800BFFF, COUNT = 0x00004000
[DEBUG]internal_flash_test (990):Check_Sector_Erased 2 (ERASED)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x0800C000, SE = 0x0800FFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (992):Check_Sector_Erased 3 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08010000, SE = 0x0801FFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (994):Check_Sector_Erased 4 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08020000, SE = 0x0803FFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (996):Check_Sector_Erased 5 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08040000, SE = 0x0805FFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (998):Check_Sector_Erased 6 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08060000, SE = 0x0807FFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (1000):Check_Sector_Erased 7 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x08080000, SE = 0x0809FFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (1002):Check_Sector_Erased 8 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x080A0000, SE = 0x080BFFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (1004):Check_Sector_Erased 9 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x080C0000, SE = 0x080DFFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (1006):Check_Sector_Erased 10 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]Check_Sector_Erased (845):SS = 0x080E0000, SE = 0x080FFFFF, COUNT = 0x00000001
[DEBUG]internal_flash_test (1008):Check_Sector_Erased 11 (DATA)
---------------------------------------------------------------------------------------
[DEBUG]internal_flash_test (1011):Warning !! This test will destroy the data stored on sector 1 and 2 !
[DEBUG]internal_flash_test (1014):1)sched_lock....
[DEBUG]internal_flash_test (1018):2)FLASH_Unlock....
[DEBUG]internal_flash_test (1022):3)EE_Init....
[DEBUG]EE_Init (146):EE_Init
[DEBUG]EE_Init (330):EE_Init >> VALID_PAGE
[DEBUG]EE_Init (345):EE_Init >> ERASED
[DEBUG]EE_Init (347):EE_Init >> FLASH_EraseSector 1
[DEBUG]Check_Sector_Erased (845):SS = 0x08008000, SE = 0x0800BFFF, COUNT = 0x00004000
[DEBUG]EE_Init (355):Page 1 blank, skip to erase it.
[DEBUG]internal_flash_test (1025):4)FLASH_Lock....
[DEBUG]internal_flash_test (1029):5)sched_unlock....
nsh>
---------------------------------------
-log for DJI F450 :
---------------------------------------
ABCDF
nsh_romfsetc: nsh > romfs_img_len 0x80B7DC8
nsh_romfsetc: nsh > Mounting ROMFS filesystem at target=/etc with source=/dev/ram0
[boot] Initializing HRT Callout Interface
[boot] Initializing CPU Load Estimation
[boot] Initializing Serial DMA
[boot] Initializing PCA9533 and PCA9536
[PCA953X] on I2C bus 2 at 0x62
[TMRFC_LED] led_off, led = 0x338
[TMRFC_LED] led_off, led = 0x332
[TMRFC_LED] led_on, led = 0x334
[boot] Initializing soft SPI for the MMC/SD slot
[boot] Successfully initialized soft SPI for the MMC/SD slot
[boot] Binding soft SPI device to MMC/SD slot 0
[boot] Successfuly bound Soft SPI device to MMC/SD slot 0
[boot] Initializing SPI3
[init] MODE = autostart
[init] Looking for microSD...
[init] Card mounted at /fs/microsd
[init] tone_alarm start
[init] Reading /fs/microsd/etc/rc.txt
sercon: Registering CDC/ACM serial driver
uart_register: Registering /dev/ttyACM0
sercon: Successfully registered the CDC/ACM serial driver
[init] eeprom
eeprom: mounted EEPROM at /eeprom
param: end of parameters
sercon:: ERROR: Already connected
[init] Start the ORB
[uorb] ready
param: selected parameter default file /fs/microsd/params
[init] param load /fs/microsd/params
param: end of parameters
Try to get an USB console
nshterm [12:100]
11: + SYS_AUTOSTART: equal
Load .. 11_dji_f450
[init] TMRFC v1 on DJI F450
MAV_TYPE: curr: 1 -> new: 2
nsh: px4io: command not found
mavlink: MAVLink v1.0 serial interface starting...
mavlink: DOWNLINK MODE
mavlink: UART is /dev/ttyS2, baudrate is 57600
[fcservo] default PWM output device
<fcservo> MODE_12PWM
<fcservo> set_pwm_rate 0 50 50
[fcservo] starting
<fcservo> adjusted actuator update interval to 20ms
<fcservo> MIXERIOCRESET
<fcservo> MIXERIOCLOADBUF
<fcservo> new MixerGroup
<fcservo> set_pwm_rate 0 50 400
<fcservo> set_pwm_rate fff 50 400
<fcservo> adjusted actuator update interval to 2ms
[uorb] already loaded
uORB started
ADC
<adc> init done
[MPU6050] on I2C bus 2 at 0x69
[MPU6050] Ready.
[HMC5883] on I2C bus 2 at 0x1e
[HMC5883] Ready.
[MS5611_I2C] on I2C bus 2 at 0x77
[MS5611] Ready.
[sensors] Initializing..
sensors_task: using system accel
sensors_task: using system gyro
sensors_task: mag cal status changed
preflight_check [38:100]
commander: starting
commander: No RGB LED found
sdlog2: logging to directory: /fs/microsd/sess003
sdlog2: log buffer size: 16384 bytes.
[gps] starting
[gps] failed to open serial port: /dev/ttyS3 err: 2
Extended Kalman Filter Attitude Estimator initialized..
position_estimator_inav: started.
multirotor_att_control: starting
multirotor_pos_control: start
multirotor_pos_control: started
sdlog2: start logging.
sdlog2_writer: logging to: /fs/microsd/sess003/log001.bin.
position_estimator_inav: init baro: alt = 45.242
position_estimator_inav: main loop started.