I wrote an article which demonstrates how to build an inexpensive Bluetooth bridge between an SiK telemetry radio and an iOS device.
The article will be of interest if you’re building telemetry or ground control station software for iOS.
When I first started working with Pixhawk I was frustrated that I couldn’t use my iPhone as a development platform. I’m glad to have finally solved that problem. The problem is that iOS doesn’t provide the required operating system level libraries to communicate with serial port interfaces such as those on SiK radios. You could attempt to join Apple’s MFi program but that's out of the question unless you're a company intending to develop an accessory.
Solving radio telemetry for iOS involves hardware, and at the core of the solution is an ingenious bit of kit from RedBearLab named BLE Mini.
Other common Bluetooth modules are simple serial port adapters over Bluetooth, however these are useless for iOS. In contrast, BLE mini provides a Bluetooth peripheral service and a set of characteristics which bridge communication with a serial port connected to its pin headers.
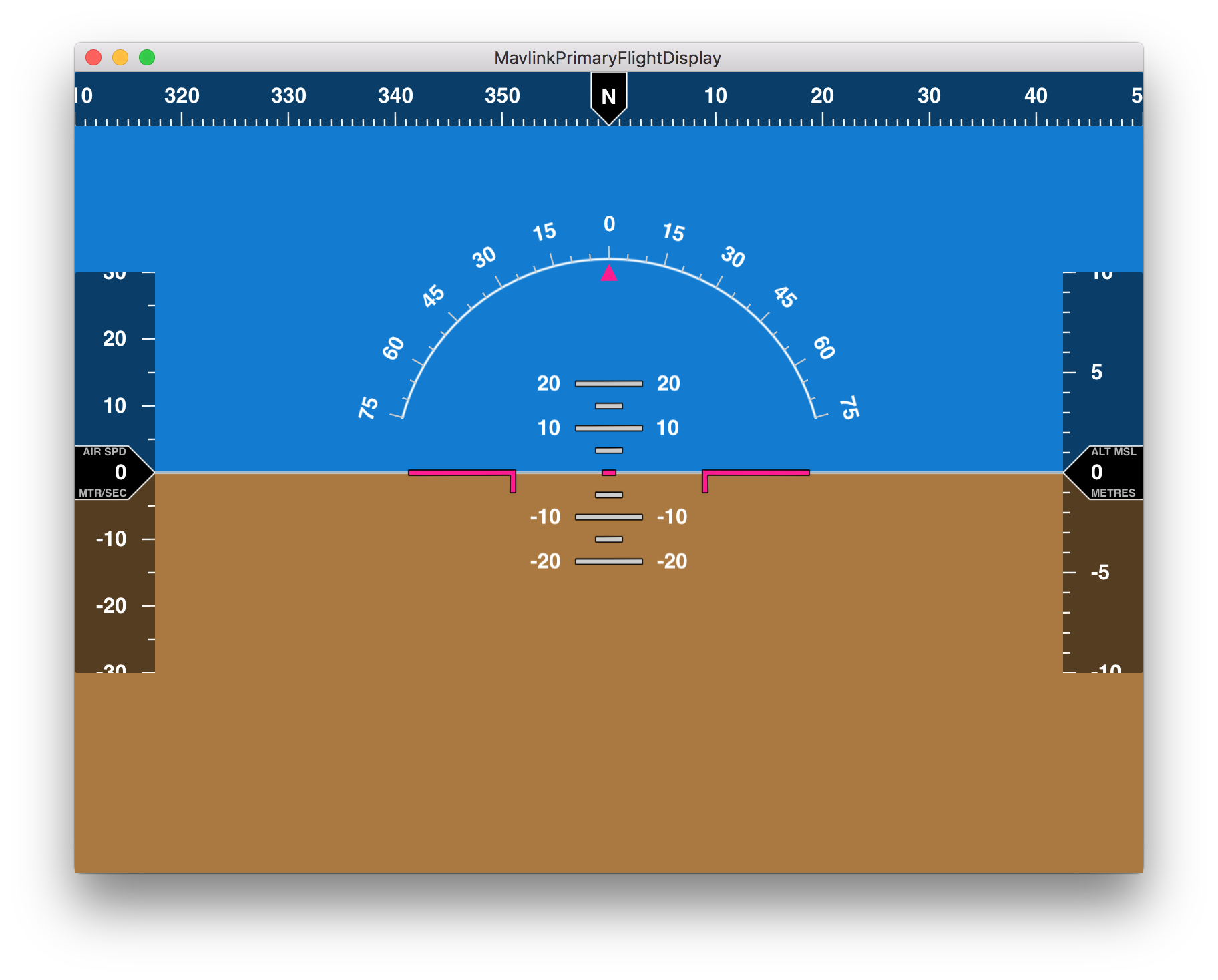
My article covers the solution from a hardware and software standpoint. An example iPhone and iPad primary flight display app is available from my GitHub which works with the described hardware setup. Follow the brief instructions in the README.md to get the app running.
Enjoy!