A big hello to all the intelligent lifeforms everywhere and to everyone else out there, the secret is to bang the rocks together.
I just want to update you all on my current project work. The design started by deciding the performance objectives for the UAV which are as follows:
- 30 min cruise endurance + 10 min VTOL + 5 min take off landing
- Around 15 m/s cruise speed and a flying altitude of 150 m
- An operational radius of 30 km
- A payload capacity of >2 kg which will include thermal/IR cameras etc.
The UAV configuration will comprise of 2 tilt-rotors which will be active during all of the flight phases and also one main rotor which will be just active during the VTOL and hovering phase. In the cruise mode, tiltrotors will be turned to the flight direction using simple servo motors and the power of the coaxial central motor will be boosted to provide necessary lift. Once the transition is completed, the central motor will be slowly turned off so as to maintain constant altitude and the duct will be closed to reduce drag.
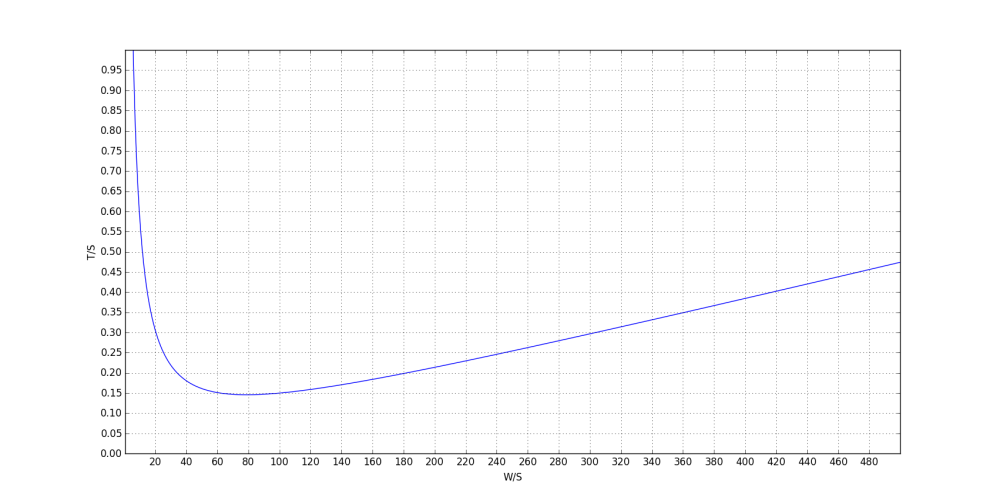
The above image is the result of trade studies that were performed to estimate thrust and weight loading for the UAV.
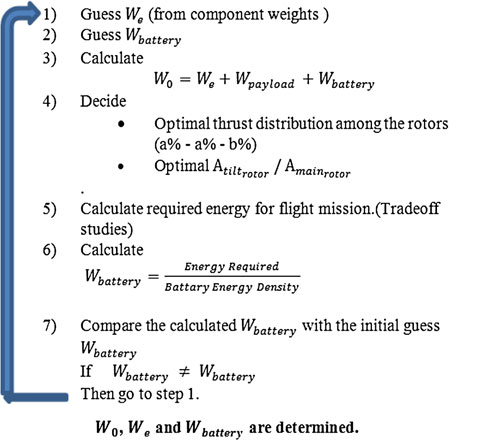
After running initial weight estimation algorithm and performing the trade studies, T/W and W/S were decided along with the thrust distributions for the rotors. The image shows the weight estimation algorithm that was used along with trade studies for determining thrust and wing loading.
After preparing concept sketches for the UAV, blended wing configuration was selected by keeping in mind the portability and efficiency. Flying wing configuration has a minimal wetted surface area which reduces profile drag significantly. The absence of stabilizing surfaces induces higher maneuverability, which is essential to the UAV. Use of commercially available autopilots will greatly ameliorate the dearth of stability in flight dynamics. Once this was completed we moved to selecting airfoils for the flying wing VTOL tilt-rotor. Different reflex airfoils were analyzed in PROFILI so as to enhance the maximum lift coefficient while limiting the maximum drag. In addition to the flying wing design, blended winglets will be used to enhance the aerodynamic efficiency. Winglets will house the rudder controls for the UAV.

This image shows the UAV in VTOL mode with the central open hub which we plan to close in cruise flight. Eppler 334 was selected for the central plank section, NACA34112 for the wing plan-form and NACA0012 for the winglet. The next step was to perform preliminary iterations in a basic software like XFLR5 so as to get some results for number crunching.
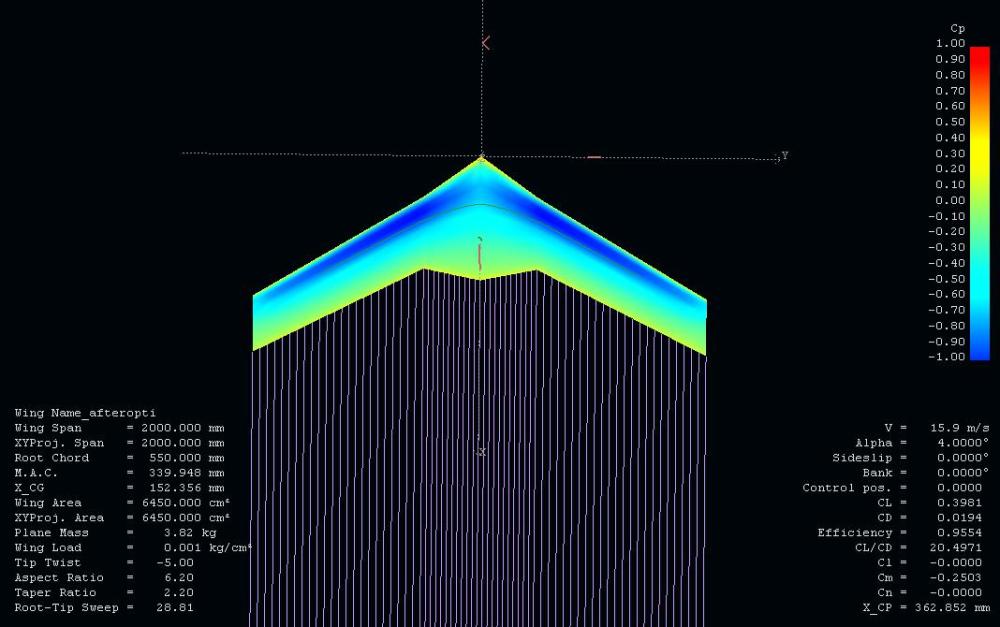
The above image is the result of aforementioned XFLR5 analysis showing the air stream flow around the UAV at trimmed flight of 4 degrees along with the pressure contours. A CL/CD of around 20.5 is achieved which proves the initial guess of superior flying wing efficiency as compared to conventional configurations.
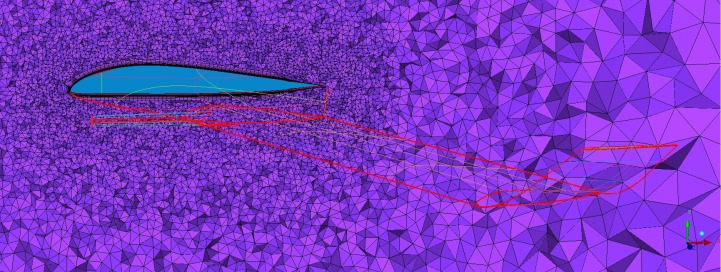
This image shows the side view of the mesh that was generated for CFD analysis.
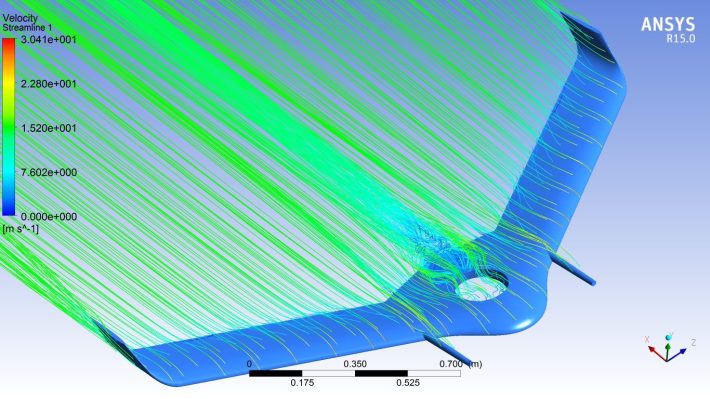
This is flow field around the UAV in cruise flight with the flap open, the drag penalty can be seen clearly in the form of vortices.
This brings me to the end of my blog post. I'll update you guys on more once I get some substantial results.
Looking forward to your expert opinions in the comments below.
So long and thanks for all the fish.
-Karan
Comments
Sometimes I think its better to walk 500m and find a better launch site. VTOL brings such complexity. That can be overcome with a 60 second 500m transit.... Try putting a little bit of tip underneath as well and see what that does. Nice use of the tools, well done.
Hi Karan
This is an amazing job!
Very professional to be honest.
Have you thought about CG positioning and VTOL control?
I am involved in something similar: I may be of help.
Regards
-
1
-
2
of 2 Next