https://www.kickstarter.com/projects/89577853/stem-system-the-best-way-to-interact-with-virtual
sixense.com
This was an interesting concept for indoor navigation. It's 1 of those ideas you're always aware of but dismiss because the electromagnets would be too weak. Someone actually tried it.
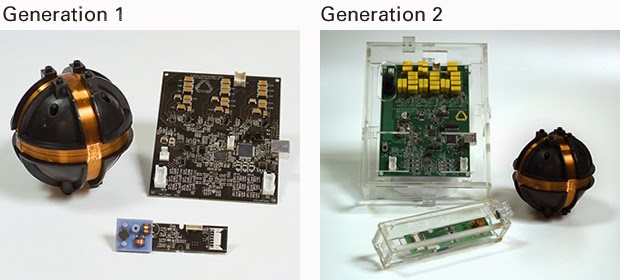
Magnetometers have gotten sensitive enough for it to work. Barely visible in the photo are 3 large inductors used by the roaming unit to sense very faint electromagnetic oscillation from the base station. The base has lots of capacitors for pulsing the coils with a very high current.
The roamer measures direction & intensity, but probably not time of flight. The intensity measurement is probably very bad. The 1mm precision they claim would be in tangential movement. 2 base stations could give it much better accuracy, but require alignment.
Increasing the range could be a matter of bigger inductors or a bigger base station. There are no teardowns or benchmarks. The consumers are all salesmen or reporters with no interest in how it works. There's no data on its precision at its maximum range of 8ft.
The advantages would be no calibration or alignment of cameras & no interference from ambient light. You could throw the base station down anywhere. In an explosion of lots of micro startups with lame ideas & no funding, this idea seems to have potential.
They remind me of Invensense, initially targeting the news maker of the time: 3D printing, & conspicuously avoiding any mention of the giant elephant in the room: drones. Invensense still targets phone cameras, making no mention of the millions of flying toys on their page.
Comments
It is a nice idea. One possibility regarding the vehicle motor interference problem might be to reverse the system and put the magnetometers around the room and then measure the "interference" from the vehicle to determined its location. The cool looking coil reminds me of "The Machine" from the movie Contact.
GPS = Absolute position (sort of and not so good indoors)
Beacon = local relative position (presented here, also assorted other IR beacon types.
Object and or environment relative position = Sonar -> Laser scanner -> Structured light -> TOF camera
Possibly something combining all 3 methods to progressively refine pertinent data: Obstacles -> Openings -> Paths -> Identified objects -> movement of obstacles / objects.
Oriented towards the smallest data sets required to maintain relevant and pertinent data.
Simple obstacle = perimeter box or cylinder definition, path segment = vector with start and end coordinates.
Combination of data capture devices could be operated in real time so as to extract only necessary information for specific task at hand and extracted information could be stored for future reference as minimized data set.
(Real Time Adaptive Navigation, sort of a sub/superset of SLAM.)
Fuctionally possibly one scenario -> Acquire approximate absolute position with GPS.
Use sensor devices to identify a number of intended stationary monoliths, store position of monoliths based on GPS data.
As Robot navigates refine monoliths absolute positions as reflected from GPS also acquiring new monoliths and using continuing updates to refine all monoliths absolute positions.
Clearly outdoors at least you could fairly rapidly refine your and your monoliths absolute positions to a very fine degree. And as such you would also be able to refine ally your path and obstacle positions equally.
You could then of course, carry this indoors by simply associating new indoor monoliths with the monoliths and your known absolute position from outdoors.
Depending on sensor resolution and update frequency, position error creep could be from very small to non-existent.
Monoliths could be things of consistent shape and size easily identified (outdoors, I would think telephone poles might be one good example. Indoors, wall edges and openings and ceiling corners could work well, both have a strong tendency not to move around much.
Just sort of whistling into the wind here.
what about the magnetic interference produced by esc and other equipment onboard. Do anyone know if it would lower the positioning quality?