
This drone 'stuff' seems to have taken over my brain, with FPV thanks to John Arne Birkeland's "Crawler 1" videos. I like how John's thinking process worked, testing the vehicle's drone capabilities via FPV driving made sense to me, and also FPV just looked cool!
So I've resigned myself decided that I'll be buying an autopilot eventually, but there are things with my vehicle I'd like to do first, and make sure they're compatible down the road. (that makes it sound like it's a bad thing, but it's only bad for my wallet!)
My current 'ride' is an 1/10th RC Truck, the Axial Wraith specifically. I've been playing with it since Feb/March 2012, worked out some of the problems with it, shaken out some of the more-easily-broken parts, and got it to a place where I can compete on the rocks and bash on the trails and have lots of fun in both places (without leaving a trail of parts behind me).
I realise from all the ardurover talk that the Wraith itself probably won't be the Urban Assault Drone of my dreams. Being 1/10th scale it has a problem with stairs and large curbs and other urban-environment things. It is also prone to being top-heavy and rolling over (less so now with my CoG lowering changes), and the environments I drive in can tend towards the muddy/watery, so I'd have to make sure everything's water 'resistant' at the very least. But I think it will be a good vehicle to test the various technological capabilities, so that in the future if I want to upgrade to a 1/8+ size vehicle, I'll have much more experience with a functioning smaller-scale system (as well as some hardware I may just be able to transfer over).
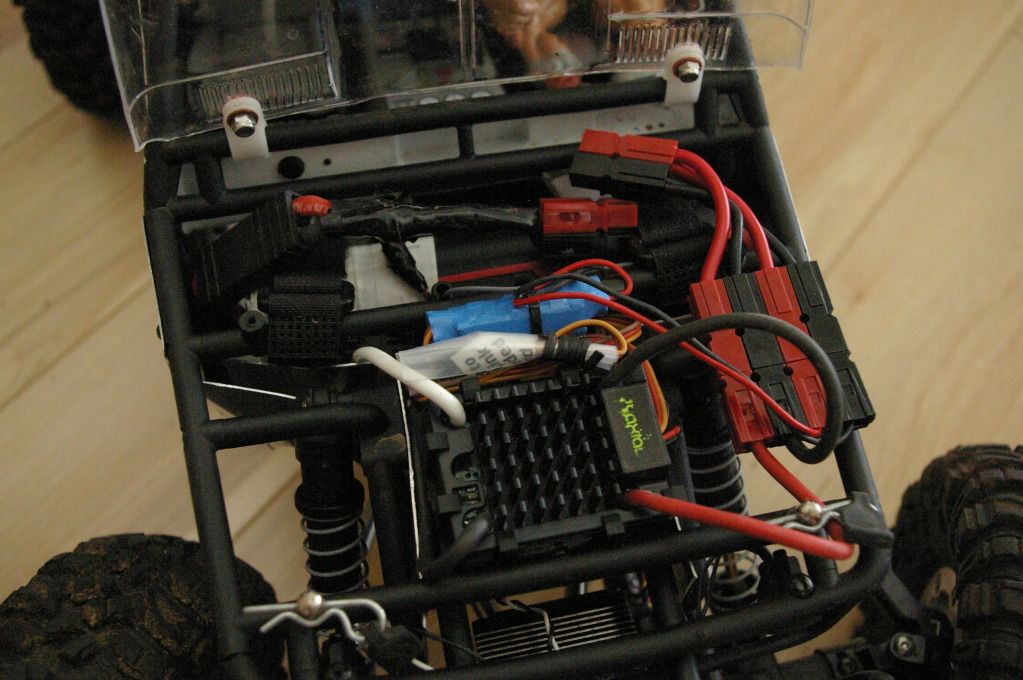 Under the Hood, all basic electronics squeezed to fit!
Under the Hood, all basic electronics squeezed to fit!
 Rear View, showing the space I've cleared for future electronics. I think the APM2 will just fit into the space between the shock mounts.
Rear View, showing the space I've cleared for future electronics. I think the APM2 will just fit into the space between the shock mounts.
I'd like to be able to film FPV (and eventually drive FPV w/ same camera), with a camera mounted into the cabin of the vehicle. I've been looking at GoPro w/ AV out on a pan/tilt gimbal. Spacing will be tight, I may have to kick He-Man out of the driver's seat, but I think it'll fit inside. To do FPV with OSD I'd need the A/V cable for the GP and to add the various OSD/Tx stuff for that, and that's where the options are starting to get confusing.
I'd also like to be able to 'map' where I've been, even if I don't use any of the RTL/autopilot automatic driving stuff. What made me think of this was the rock-crawling competitions, I could map my own line and use the waypoint setting ability to mark where each gate is on the course.
I know the APM2 can do the auto-mapping (I've seen posts to that effect buried in here somewhere), but it's the various FPV/OSD combinations I'm wondering about. It would seem the 'easiest' way to get what I want, with a minimum of overlapping abilities, is APM2+minimosd, but I wouldn't mind some real-world confirmation and usage pointers for stuff like that. There are OSDs made for FPV that also function as a mini-autopilot, with their own GPS and RTL capabilities, but I'm not sure if there's a single all-in-one unit to rule them all or not.
So please, if you don't mind, I'd love to read opinion on this, how your experiences have worked out for you, pointers to other web-resources I may not have read already over the last few months. I'm sure I'm not the only noob with these questions. ;)
In the end, I'll probably attempt a total-awareness vehicle, driving around tracking everything, mapping wifi, maybe even terrain mapping, but I'm trying to limit myself and start small, instead of jumping into the deep end with both feet and ending up over-my-head and drowning-in-bits!
Also I've been lurking here long enough I thought I should at least introduce myself and my ride: ;)
Comments
I just measured the space in the rear between the shock mounts, on top of the existing 'bottom'. This space is originally intended for a battery tray, that has tie-downs used to strap in the battery, but doesn't help the CoG there. I'm hoping to put an APM or something in there, or perhaps just a project box to hold the FPV electronics, I'm not sure.
The available space is (metric measured, imperial calculated):
width: 54mm / 2.126 inches
length: 100mm / 3.937 inches
height: ~45-70+mm / ~1.722-2.559 inches
The height can be higher, it's just a question again of CoG and how much space you need. Also, after the ~45mm height you can also get much wider, right to the edges of the vehicle, but not quite full length (~70mm, the remaining is hiding under the interior skin (I'm not sure if it's exactly 45 all the way along, hence the ~, I'll give it a proper measure when I have it apart next.)
If someone who owns an APM2 pins-up case and wouldn't mind measuring, I'd love to know if it'll fit in the dimensions given above!
Thanks for reading!
I'm not sure the toy-grade is a good idea, you're going to want the ability to find parts and upgrade stuff as you go, so it may end up with something like the Maisto that you're having to fab your own parts or buy new vehicles for use as parts machines.
BTW, the best place online I've found to look for rock crawler information is: http://rccrawler.com/forum/ I look in there for everything first!
I think actually (and ironically) the cheapest way to start may be with the Redcat Rockslide 1/8th scale that John and some others are using. IIRC you can get RTR (ready-to-run) for $300, so just need batteries and charger. It's cheaper than my wraith, and bigger as well, but Redcat doesn't have the after market of parts that some other manufacturers has built up. That seems to be what keeps some people away from the RedCats, the upgrade parts are mostly all offered by RedCat too, and not many by 3rd parties, where as a manufacturer like Axial has a lot of support for their after-market parts, lots of companies fighting to make those parts, and lots of vehicles that are parts-compatible. I don't think it's a huge deal, just something to be aware of for when you inevitably have something break.
What do you think about Maisto Crawler?
https://www.youtube.com/watch?v=nOvfXcFGZws
And I just remembered probably the single-most effective upgrade, better wheels and tires! I upgraded to heavier solid aluminum beadlocks, I'm not sure the foams I used inside, and the tires are Axial's Ripsaw (same pattern as stock wraith tires) with R35 stickier rock crawler compound. They are fantastic on the rocks, but not great when wet, so some trails get a bit hairy!
I'm thinking for FPV counter-balance, maybe aluminum axles and front-axle-weights, trying to keep it from rolling over in my head!
u4eake: I've been following the code development on there since Day 1. I haven't (yet) been brave enough to dive in. I've got no arduino experience either, just some rusty coding experience in various languages (C, various forms of older Basic, perl, php, others I haven't used in ages [OOT 4evar!]), but this arduino has given me ideas beyond my abilities, so I'm gonna need to start to practice. I'm thinking about DIYing a cellphone even, not sure if that's a good thing or not...
Also, how does the stuff work in Wine? Or would I be better off going back to setting up a winders box and dual-boot if necessary? There are already some windows-but-not-wine RC-related stuff I'm needing to support, so it's not a terrible thing, I may just need to reallocate a laptop for the purpose.
I was initially thinking of just getting an older APM1, but that was with the previous iteration of ArduRover, b4 the current (and apparently much more successful) APM1+2 version. And for my vehicle the APM1 may be too big for 'comfort' too.
Actually, that does bring up a question. I haven't seen the outside dimensions of the 2 APM2 boxes given. Have I missed that somewhere, or would someone mind measuring them for me. I'm _very_ curious to see if one of them will fit in the rear space between the shocks... It's a perfect spot for it.
John: The wraith has a tendency to be top-heavy and thus roll-over, so I think inside would be a much safer place for the camera. Due to my driving I've found myself upside down in the water/mud more than once too. :) So far everything has been AOK (rumour has it the wraiths are quite good at taking the water w/o any official 'waterproofing'). I am wondering about mounting the gopro upside down, I could rig something to mount it to on the roof with the camera itself protected inside the cab, and as a bonus the p/t rig could double as both a shield and if shaped properly could help get me back on my wheels during a roll-over.
It could also serve triple-duty as a mount for the GPS I want to put on the roof. My reading has lead me to believe that's the best place for it, again if I can protect/water'proof' it. I've also read the aluminum armour may bugger w/ the GPS, but may help if used as a backing shield, which was another reason for wanting GPS on the roof.
The only problem with that plan I can see is the 'tilt'... I think it's necessary, at least for FPV-piloting if not 1st stage record-only, but inside the cab there's not much space to tilt, or anything to see. I think you'd need to be able to see down at least near the wheels and up the rocks/trail where you're headed, beside left/right(360horizontal?). The GP on the roof would give much more tiltability, at the cost of much more top-heavy and potentially shock-and-load bearing. This machine has fallen off the rocks from a much longer distance than I would find personally comfortable, and I only had crappy-crimped tamiyas come loose on me (first attempt at crimping tamiya, w/o proper tool). It was at least 20 feet down with 3 | 4 bounces constantly rolling. If it were to be on the roof, perhaps protected with something transparent and very very tough?
This BTW is a good demonstration of some of the wraith's drawbacks, space (1/10th scale, integrated 'body' and frame) and top-heaviness.
Yurezzz: I bought this one RTR. I would have bought a kit if IKNTWIKN (If I Knew Then What I Knew Now), but it was my first 'hobby-grade' toy ever basically. It's classified as a 'rock racer', so is faster than a normal rock crawler, but more capable on the rocks than your 'typical' offroad RC (according to the branding anyway). They are an extremely fun and capable vehicle, with lots of upgrade potential, but start up riding too high and too top heavy. It has a new 'brother' called the ridgeback. Basically all the 'guts' of a wraith, but with the more traditional (at least to this size/type of 4wd) lexan-body mounted on 4 posts, and H-frame underneath. I have seen Ridgebacks at our local crawling spot too, and they are certainly equally capable.
It depends on what you want your crawler for, competition/1/10th scale fun, or true go-anywhere-drone. I'm convinced the ardurover recommendations of 1/8th scale (at least) are true for full capability. 1/10th scale you have to start with the idea you will NOT be able to go anywhere, IMNSHO anyway. Most stairs, for instance, are very difficult if not impossible w/ the wraith. :( It does however, give a fun challenge, and I have heard others with more 1/8 experience say it's not as 'fun' because it just goes and goes with no real challenge.
BUT, given that I still think it's an awesome and fun little truck worthy of doing lots of stuff other than being a go-anywhere-drone. ;)
First thing I did was lower the CG. There are shock lowering kits, but I haven't needed to go that far (yet!). I flipped all the lower shock mounts (shocks are mounted on the axles on mounts shared with the lower suspension links, but can be removed and reinstalled upside down). It's small but surprisingly noticeable. Same goes for the upper-rear shock mount, that piece of frame can be flipped giving you another rear drop.
I have moved my electronics around playing with stuff, but knowing what I know now, w/ the Wraith I'd go straight to what I've done. ESC on top of Rx box (there's a 'waterproof' box with Rx, light controls and extra cables underneath the ESC [thing w/ heatsink]), with the ESC-mount part of the frame cut off and the battery moved up there. I just strap the battery as low to the frame as I can. So far NiMH and 2s 3300mah lipos fit as low as the chassis floor. Larger batteries can fit up higher. The only thing about that I would change is a larger, custom 'waterproof' box, with room for not only the Rx and 'stuff', but the ESC itself, as well as a CC Bec Pro for steering servo voltage/amps (have a normal CCBEC in there for single servo now).
The kit comes with better quality 'upgrade' parts, where as the RTR is dead-simple low-end. I have had to upgrade a LOT to get it where it is, as well as the inevitable it-would-run-better-with wants that have crept in. I started the project knowing my budget was ultimately limited, but not knowing exactly what I'd need to spend. So I decided to basically upgrade as I needed it, mainly when I broke something or hit an obvious wall due to technological and not driver problems.
Partial list:
Learned at my first competition that I was lucky to have not smoked my stock motor doing to it what I was doing. Later on in the trails afterwards the skidplate (plastic) was itself hot to the touch from the motor heat. So, since I wasn't driving anywhere near where I wanted to yet, I researched and bought a new motor (and gearing), since a motor wasn't something I was interested in busting if I could avoid it. Stock motor is a reverse rotation 540 can 24T IIRC, the new one is a Traxxas Titan 21T 550. I haven't yet had a chance to try this one at the competition rocks, but around my neighbourhood it's fan-f!ing-tastic.
Some of the wraiths can be made silly-fast. 35T motors with the proper gearing and ESC, and you can wheelie from stopped and somersault the rocks with the throttle under your fingers.
There are some kick-ass goodies for these crawlers, the wraith included. The wraith specifically is shaft-based, not motor-on-axle, so that's another reason for it's high COG. There are 2-speed transmissions, rear 3-position (4wd, 2wd, rear wheel lock) DIG units, rear-wheel-steering setups (basically the rear and front are the same, the rear has straight lock-out nuts, the front has the steering mechanism instead, so you can buy another 'front' steering setup and give yourself 4ws). DIG and 4ws are both fantastic. I've seen them be very useful on trails/rocks, not just in competition, and I'm really curious about programming that functionality into the APM, if I can figure out how.
With an MOA (Motor on Axle) crawler, your CoG is much more friendly, you have a nice plate raised-up to store batteries/cameras/etc as well as keep it relatively protected. You don't need extra stuff to do DIG, since you can program that into your ESC and are running separate motors. They're not as 'good' on trails/mud, but I'm not sure how much that can change with different tires. All of my experience with MoA crawlers is observing at comps and on the trails afterwards, and they've all been 1/10th scale too.
I have even dreamed of the 1/5th Killer Krawler (almost 100% aluminum $1000USD Beauty), but I can hear my wallet sob quietly whenever I say that name out loud. Which is funny, because I'm at least that into the wraith given RTR start-up and the various upgrades.
Wow, sorry for the terribly long post. i've been thinking about this stuff for a while, but haven't actually put it all down b4. lol! I hope it's helped! Sorry for the repeating myself too, being stay-at-home father with young children during summer vacation makes it hard to focus. lol!
Thanks Vishal! I look forward to your TLT APM! project! ;)
I've recently gotten me a turnigy trailblazer and have put my fpv gear on it. It sure is a special experience.
I'm now in the process of getting my apm1 1280 to work reliably with it and have it navigate waypoints. I have already made some changes to my ardurover code, see the blog from JLN (click on ardurover -> discussion and go to page 55-56)
Great project, I've got an old TLT based crawler that is waiting to receive my old APM1.
Nice ride, Adam! Can you tell me more about upgrades that you did on the chassis? Thanks! I'm thinking to buy a crawler, but haven't decided which one.
Hi. :)
If you leave the gopro in the protective casing it can take a beating, so you could just mount it on the roof. Just drill a hole in the casing for the AV wires. And make a hole in the roof for a standard size servo so you have pan for the camera.