From Hackster:
"Engineers at the University of Toronto have designed a fully open sourced dual-rotor tail-sitter MAV using readily available electronics and 3D-printed parts. The Phoenix drone is based on the PX4 autopilot platform, PX4 middleware, and is equipped with a Pixracer flight computer, supporting both flight control and ArduPilot’s SITL simulation.
“Our open source package, available on GitHub, includes mechanical design documents, component lists, a carefully tuned and verified dynamics model, control software, and a full set of simulation tools — in short, everything necessary to understand, construct, test and verify a prototypical tail-sitter MAV.”
On the hardware end, the Phoenix is outfitted with a flight computer that packs an STM32F427VIT6 SoC loaded with a Cortex-M4F microprocessor (256Kb of SRAM), and a series of sensors — an Invensense ICM20608 (accel/gyro), an MPU-9250 (accel/gyro/mag), a Measurement Specialties MS5611 barometer, and a HMC5983 magnetometer (with temp compensation).
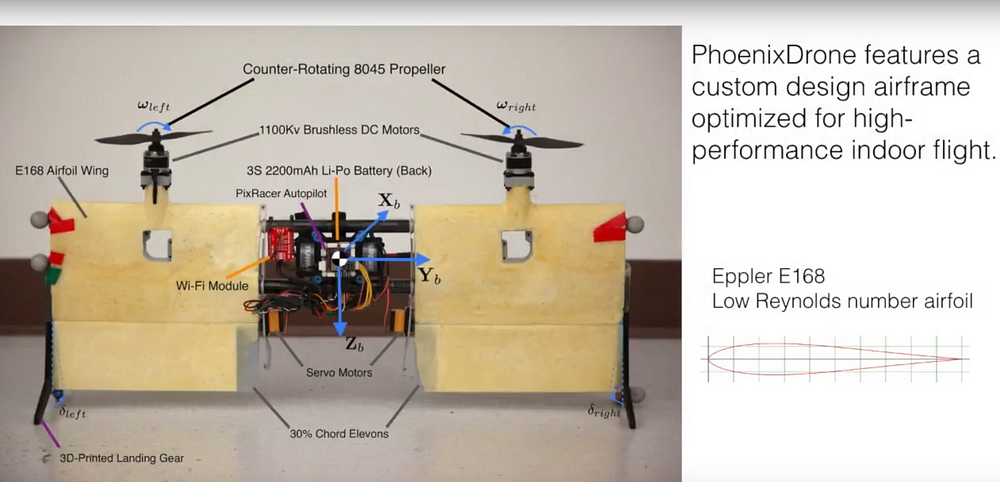
The drone’s frame was constructed out of a cast polyurethane foam core and 3D-printed plastic parts, making it extremely light. Driving the Phoenix are a pair of Gemfan 8-inch diameter 4.5-inch pitch propellers, powered by TMotor 2208–18 1100 Kv brushless DC motors and a 2200mAh Li-Po battery.
On the software side, the engineers tasked custom flight-control software based on the Pixracer autopilot platform with PX4 support, along with ESC firmware (based on BLHeli), and the MAVROS robot OS, which they use to tie in the Phoenix to a ground station for control. They also included a MATLABSimulink system and SITL Gazebo to compile and test flight code on a desktop PC. The team states that the Phoenix is a great learning and research platform, and hope educators, hobbyists, and researchers use it to create “innovative new modifications and derivatives.”
Comments