I have successfully tested the Cheerson CX-20 Auto-Pathfinder (also called the Quanum NOVA). This quadcopter uses an APM v2.52 with the ArduCopter v3.1.2 already installed. It fly very well and all the Arducopter features are working very well....
Above, a video during the maiden flight of the CX-20 has been taken with a GoPro 3 "Black Edition" mounted on the anti-jello mounting base.
Test conditions: Wind 22 Km/h gusting 33 Km/h
The APM 2.5.2 (with an external magnetometer) with the Arducopter v3.1.2 handle very well the CX-20, the flight is very stable in loiter mode in spite of the strong gusts.

Below the factory PID installed:

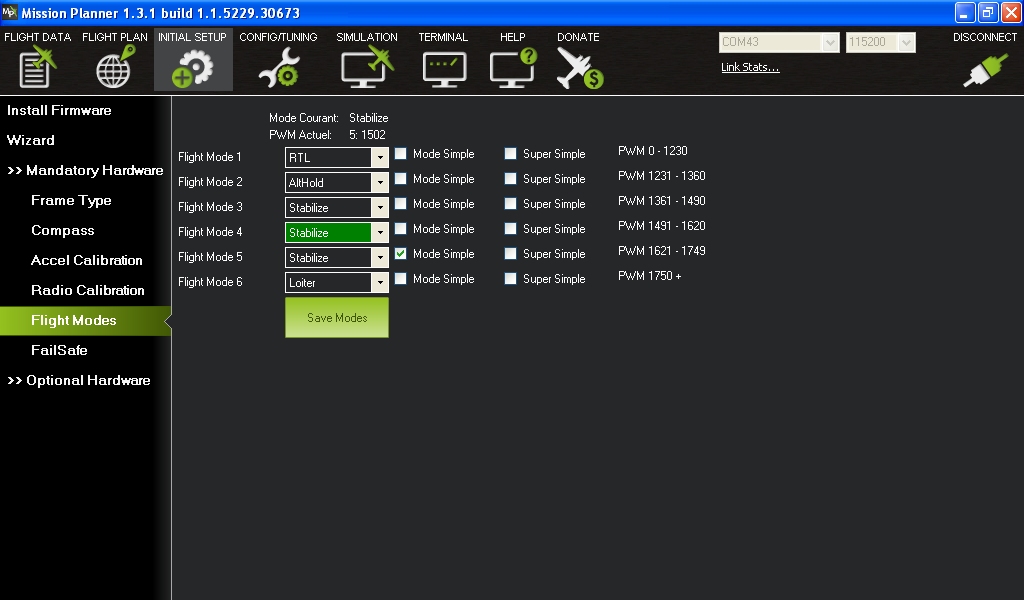
The flight modes set by default:
I have added a telemetry datalink and tested sucessfully the Droid Planner v2.0 (Android) and the Mission Planner (PC).

More infos at:
http://diydrones.com/profile/JeanLouisNaudin
https://github.com/jlnaudin/x-VTOLdrone
Stay tuned,
Jean-Louis
Comments
I need help. Does anyone have the factory settings i can load into my quanum nova. I have RTF version and red light on back just double blinks cant arm motors. Also have one motor that stopped working before this happened.
Hi Jean,
Very helpful blog. I am new to all this and recently purchased the quanum nova. I have not been able to get the motors to unlock. What I have done thus far:
1) Turn on Quanum
2) Turn on TX (swb and swa set to 0)
3) wait for GPS to hold. (Green light on steadily)
4) Move left hand throttle to lower right and then.... That is when nothing else happens.
Am I missing a step? I am trying to decide if I should return the unit, but obviously would love to hear I am just doing something incorrectly. Thanks in advance for your assistance and great blog! Very helpful.
Cheers,
G
@JL, thanks, I will check it!
@a_paolo : No, this will not affect the stabilitity in STABILIZE mode, this will affect only the LOITER, AUTO, RTL mode because the GPS is used in this case. If you have damaged the arms of the quad, I recommend you to check carefully that the level of the propeller are all well aligned (horizontal level). If one arm is a bit twisted this may create wooble and unstability.
JL
JL, do you think it can affect also the stability of the drone in manual mode?
I had an issue last sunday, not able to keep stable the QN and it lead to some damage on the quad... I did sensor calibration then but I need to test next weeked, if weather allow...
Thanks Jean Luis But My problem is not with GPS itself But rather with throttle/ESC setup
I have it in manual mode with the drone at terrain level after landing and also without propellers
@Paolo: Be careful, at this moment there are some troubles in the GPS accuracy (HDOP) and sometime the GPS doesn't lock or unlock in flight due to the current solar geomagetic storm activity since august 27, 2014 which may affect the satellites GPS...
See the NOAA web site a t: http://www.swpc.noaa.gov/alerts/alerts_timeline.html
Regards,
Jean-Louis
Hello
I've made several basic flight without problem with my Quanum Nova
Some days ago somothingh "strange" has happen, after a rought landing the motors stay on even if the throttle lever on the radio was at the lover position. This caused a many damages to the quadcopter body and worst of all, the bracking of the lens on my Walkera I+ cam.
Back at home, with everthing cleaned and propeller dismounted I tried to figure out what has happened.
I performed the radio calibration as described on a video posted on you tube and tryed out to replicate the problem: I gave throttle and motors start, but when I position throttle lever to the lowest position they still spin .
All lever are in 0 position (no GPS or RTH) and the problem is here with our without good GPS signal (green light blincking or steady).
Sometimes after 1-20 seconds motors stops sometimes not and I have to open the battery circuit manually.
Can someone help me in this issue?
Found the issue, is in the connection between internal micro USB to external mini USB.
I did some checks as Cedrick suggest (thanks for the tips!) but seems there are a short circuit on this bracket cable/connectors... need to redo it completely.
Using a direct connection all work fine, also the Android version of the Planner!
sometimes he just stuck a piece of paper to rate the USB port is that market
you speak French
Can you give me your email address
I have some problem with my CX20
the engine is running all alone when I weapons
-
1
-
2
-
3
-
4
-
5
of 8 Next