I have successfully tested the Cheerson CX-20 Auto-Pathfinder (also called the Quanum NOVA). This quadcopter uses an APM v2.52 with the ArduCopter v3.1.2 already installed. It fly very well and all the Arducopter features are working very well....
Above, a video during the maiden flight of the CX-20 has been taken with a GoPro 3 "Black Edition" mounted on the anti-jello mounting base.
Test conditions: Wind 22 Km/h gusting 33 Km/h
The APM 2.5.2 (with an external magnetometer) with the Arducopter v3.1.2 handle very well the CX-20, the flight is very stable in loiter mode in spite of the strong gusts.

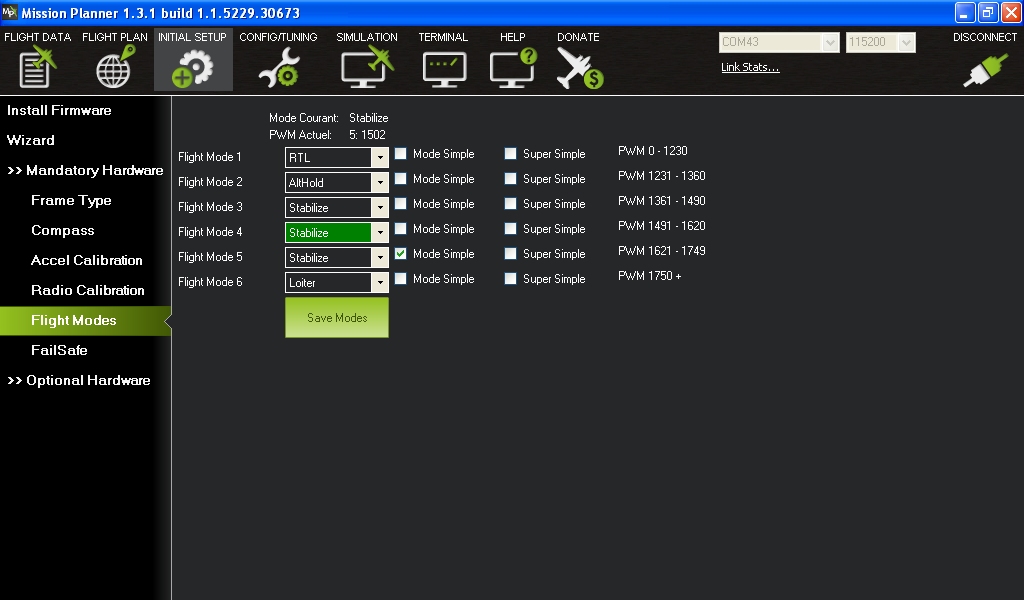
Below the factory PID installed:

The flight modes set by default:
I have added a telemetry datalink and tested sucessfully the Droid Planner v2.0 (Android) and the Mission Planner (PC).

More infos at:
http://diydrones.com/profile/JeanLouisNaudin
https://github.com/jlnaudin/x-VTOLdrone
Stay tuned,
Jean-Louis
Comments
Hi Jean-Louis,
Great advice about the Cheerson, can i ask a question,
actually, where did you bought the Cheerson?
Except Amazon.co.uk?
Thanks for your advise.
Sincerely
Jean
hi jean-louis,
i would like to verify if you are using the ff:
firmware (https://github.com/jlnaudin/x-VTOLdrone/tree/master/Firmware)
parameters (https://github.com/jlnaudin/x-VTOLdrone/blob/master/param/CX20_PID_...)
in this post?
the reason of asking is I want to flash back the old firmware. because the 3.2.1 version which i accidentally updated using mission planner seems to have many problems, like the loiter mode)
thank you and waiting for your advise.
rgds,
ren
The modified APM in the open CX20 can make some mods and upgrades challenging. I tried to get a 3DR telemetry module to work in the 2 different ways (under guidance of another who eventually got theirs to work).
Instead of constantly fighting, I have ordered an Arduacopter APM and a CC3D APM (one will go on the CX20, the other on a new build). If you don't get it to work, you might want to consider the same.
The CX20 works as is, and some upgrades work easily, but other ones will make you curse it. I also suggest you order a spare 450 frame to have on hand.
hai jean louis, i just bought a cx20 open source, i read some review they had problem connecting telemtry with 3.2.1 firmware, is there any tricks u can tell me? and can u tell me how to update it? thanks jean
Hoping someone can help me as I did something stupid (I fixed what wasn't broken).
1. I installed the latest version of Arduino (v1.6.1) as it included the drivers for my cheerson to be recognized by my PC. After driver was installed, the computer displayed the Arduino Mega 2560 (COM 5).
This is where I maid the stupid move though I'm praying it can be reversed.
2. Using Arduino v1.6.1, I clicked FILES > EXAMPLES > ANALOG > CALIBRATION then uploaded to the Cheerson.
The Cheerson displayed some changes in light activity then stopped. I disconnected the USB cabling, connected the battery to see if all was well. It wasn't so I then opted to see if I could update the firmware. I did so using the ZIP folder i have attached. Completed the update (though difficult due to my not knowing Chinese) and still, Cheerson will not engage as it simply beeps over and over in this repetitive cycle.
I have recorded a short video and posted this to youtube.com for review and hope that someone can help a dummy out.
http://youtu.be/VOYtpqxyJQg
Thanks in advance.
Mike
Sadly no. She's still never seen the air from above. Actually correct prop location and installation was one of the first things I made sure of. I haven't had them on the wrong corners yet, and toi make sure it doesn't happen, i have the props colour coded to match the nuts and motors. I am 99% sure at this point that there is a problem with the APM. The moment the throttle leaves 0%, it's at it's only speed, which is well below liftoff thrust. there is no change in speed unless you tilt the quad or move the sticks. When i tried to calibrate the ESCs, i tried them one at a time on the throttle output from the RX and they all had the normal range of speeds, but put it through the APM and it's half or nothing at all.
This is a video of what it has been doing from the start: Low RPM CX20
@Rob I hope you've figured it out already. That sounds like you got the props in wrong positions.
I am one of an apparently sizable group have the opposite problem of a flyaway. I have a "won't fly at all" problem.
I have done the compass calibration as per included instructions and the one used by end users. I have calibrated the transmitter. I have gone through mission planner several times and updated software, adjusted settings, I have ensured that the compass sensor is secure in the mast, the APM and GPS is secure. all leads seem secure and everything is setup physically as near perfect as I can see.
When I throttle up (fast or slow) it only gets to a low RPM on the props. When I throttle to near max, the whole unit tips forward. i counter with cyclic (right stick back) but the RPM on the motors never gets up enough for takeoff. As i move the cyclic stick around, you can hear the relative RPMs changing in proportion to each other but still no liftoff. and yes, i have quadruple tested the correct props are on the correct arms.
I am out of ideas, please help.
Currently on sale for $256.99 at BangGood, and an extra 6% off with coupon code: 15BGSF
Hello Jean-Louis, Does the Cheerson CX20 already have the APM hardware installed? If not, what kind of hardware I still needed. Thanks
-
1
-
2
-
3
-
4
-
5
of 8 Next