I have successfully tested the Cheerson CX-20 Auto-Pathfinder (also called the Quanum NOVA). This quadcopter uses an APM v2.52 with the ArduCopter v3.1.2 already installed. It fly very well and all the Arducopter features are working very well....
Above, a video during the maiden flight of the CX-20 has been taken with a GoPro 3 "Black Edition" mounted on the anti-jello mounting base.
Test conditions: Wind 22 Km/h gusting 33 Km/h
The APM 2.5.2 (with an external magnetometer) with the Arducopter v3.1.2 handle very well the CX-20, the flight is very stable in loiter mode in spite of the strong gusts.

Below the factory PID installed:

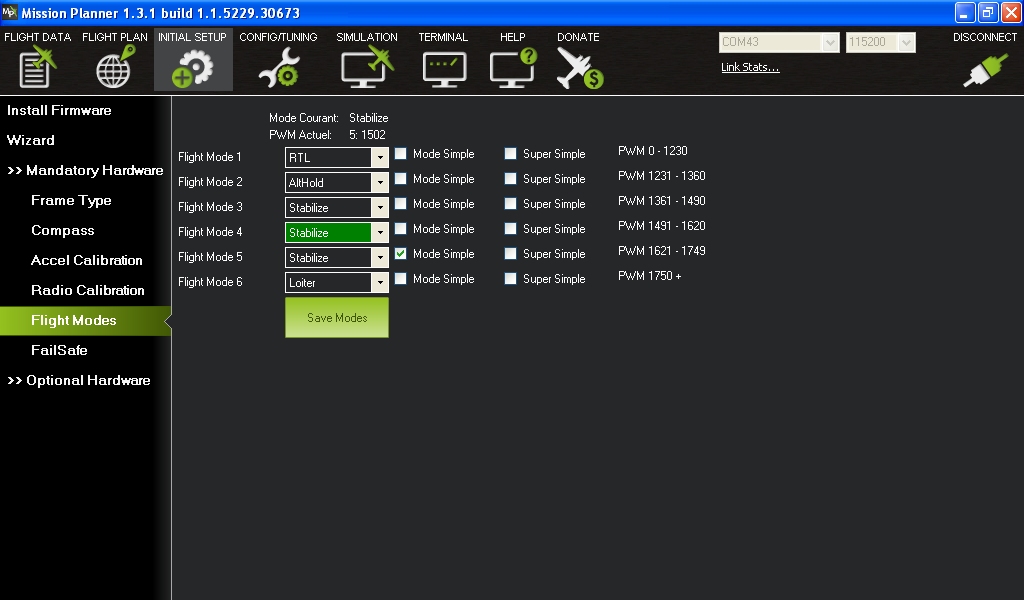
The flight modes set by default:
I have added a telemetry datalink and tested sucessfully the Droid Planner v2.0 (Android) and the Mission Planner (PC).

More infos at:
http://diydrones.com/profile/JeanLouisNaudin
https://github.com/jlnaudin/x-VTOLdrone
Stay tuned,
Jean-Louis
Comments
Not true just head to product page on HK (hobbyking) and in file section download the factory FW - flash and enjoy, thay also have stock parameters file that can be loaded.
ok thanks and what can i do?because my dron now is not working
read my lips, there is NO turning back, Cheerson has not released the stock fm to the public. The custom version is as good as you can get.
how is turning back what i do? please wrrite me? because i am new and don t know
There is no turning back once the cx20/nova stock firmware is flashed. That said, there is a custom make 3.1 version float in cx20 discussion ghread
http://ardupilot.com/forum/viewtopic.php?f=22&t=9534#p29460
my dron now is not working
i need the reinstal the factory firmware how i need that?
hi Jean my name Robert please help me i have one drone quanum nova and i conected to Mission planner and i folow the instruction and i download the firmware in my dron and now my dron is not function always is siren and the red light is flasing always is not posible conect to sender i want instal the firmware from factory in my dron and eras this one from mission planner what can i do exactly ?
Hi Jean-Louis
A bit too bad having to speak English between native French speaking people, I presume it's due to the forum rules ;>)
Is there another place where to communicate in French?
Anyway...
After reading all what I could find about the subject and getting no applicable result, I'm sorry to bother you with my problem:
I bought a CX-20 from GeekBuyer and wanted to see what was in its FC (same as yours) before accomplishing her maiden flight; I used Mission Planner which "forced" me to update the firmware.
From that moment the things went worse and worse: no way for checking (test tab) anything; after inputting "setup" in console mode, I can only get an endless series of signs ...
Well, I tried then to re initialize the FC by loading ArduRover; all was fine with it, all tests succeeded; loaded again ArduCopter, got the same cycle of problems.
No way to arm the CX-20, though I performed compass tuning and radio calibration.
It's like if an uncompleted process was blocking the arming step.
I also tried to load the CX-20_factory.param (you uploaded), but didn't know how to do it properly.
I'm now desperate!
Any clue to solve that?
Thanks a lot in advance
JpPeretti
Hello everyone.
I bought a quanum nova. I performed the update via inspection planner, and I calibrated.
Since then he flies very well stablize but ALTHOLD, loiter, it is approxi-. Let me explain: The altitude varies, and the drone moves in any direction while keeping the same direction, while deporting. However, the GPS is fixed.
If I choose RTL, it is the starting point to one or two meters.
So, I ask myself if I calibrated the compass. In the selection screen, should we choose internal GPS or external GPS? Knowing that after the compass calibration, the figure corresponding to the 3 axes almost always give: -214,12,9. What can I do to make it more stable?
you can get it from Gearbest
http://www.gearbest.com/rc-quadcopters/pp_113550.html
or banggood
http://www.banggood.com/Cheerson-CX20-Opensource-Version-AutoPathfi...
-
1
-
2
-
3
-
4
-
5
of 8 Next