ArduCutter gets airborne after the past week of building fun and a little embarrassment. It is all in the name. I recently read the line, "Multicopters are essentially flying lawnmowers.." from the ArduCopter wiki. This is not an exaggeration as my ArduCutter has cut me, and my grass. Of course I'd rather use something like an ArduMower for my grass as it would do a much better job.
This past Saturday I was 100% ready. I had received the remaining components, put in the time for building and preparing for the maiden flight. In a rush to switch gears from focusing on ArduCutter (at the time it was still ArduCopter) to leaving for dinner, I got a tad cavalier with a quick test. Already calibrated without the props, ESCs set up, all the checks I knew of complete, the craft needed nothing more but to spin up and show me where all my spare time had gone. So on goes the battery and small blips of the throttle, pitch and roll to see the response at low RPM. A bit too much roll and up she came, right toward my face. I was less than a meter away. This was really irresponsible on my part! A sliced open finger and some knee damage has given me the FULL respect these deserve. So I learned a nice little lesson. Too eager and too much of the little kid in me. Result: my only set of props was now incomplete with only three left intact.

Four days later a cheaper set of 1045 props show up and I'm ready to be an adult about this. So I thought! Today the wind was ~15mph. Clue number one. I went off to investigate the closest location with the least wind. The first task was to get into the air and simply hover, nothing fancy. As
you see in the video this is short lived as the wind makes the fenced in yard too small an area. Off to the field where the wind was about the same but much more space. More space means I can play a bit more because I am a pro already. That's the voice in the back of my head. So a few successful hops dissolve the common sense to proceed with the obvious step of completing small, quick and nearby flights finishing with the auto-trim process. With a little help from my air traffic controller I'm convinced I should flip over to loiter mode, which didn't work out too well. Back to manual a bit too late and orientation is lost. Three more broken props.
Thankfully I have spare parts and hopefully enough sense to wait for fair weather and follow the recommended steps. What a thick skull! But it was so much fun! Next up is trimming, PID adjustments, more practice in general and working through the flight modes. Only after I'm comfortable with these will I slap on the FPV gems.
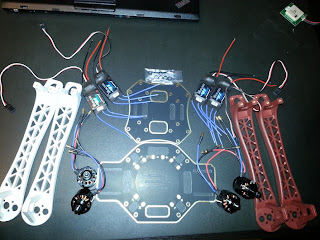
Lastly, I'm only beginning to gather up tips and tricks, as I am still new to this. However, I must say that I'm not impressed with the Flame Wheel 450 frame. It wasn't machined well, some screws don't fit without a fight and there isn't much space for mounting. Getting the FPV gear on there, stable and looking like the thing isn't a piece of transformer-esque shrapnel will be a real challenge. Looking back I wish I had a size similar to the TBS Discovery. For now, we will make do. I'm off to get some air time, more on the project soon!
From here on out I'll do the cross post from jobforadrone.com however for the last few posts feel free to jump on over to check those out! Thanks!
Comments
I am using the reptile 500, the problem I have is the battery at the back that is pulling it down at the back a bit resulting that the quad wants to go backwards the whole time when I leave the sticks alone. Do I just adjust the P value and if so do I make it positive or negative and by how much at a time?
After another couple of flights it has improved significantly as far as stability. I did ensure no trim is added on my transmitter and only making adjustments to the APM. I think it is just a matter of getting the feel for it initially and letting the calibration take place in the first few flights.
Has anyone used the Reptile 500v2 frame? In comparison to the Discovery it is a lot cheaper (on ebay from HK for ~$40) for the arms, bigger plates (but without power traces it looks like), and tall landing skids.
I also own a Flammwwheel 450 clone from Hobbyking like THIS
Is there really a difference on flex betwen the HK one and the one from DJI?
Hi Cody, On the Arducopter 2.9/2.91 Blog they discuss the hopping thing at least in relation to Alt Hold mode(s).
As I recall, one of the throttle PIDs P values needed to be adjusted.
Of course if you aren't in an Alt Hold mode, you have to manually hold altitude.
I have also found that if you accidentally dial in trim on your transmitter on yaw, roll or pitch that can result in level being off as well. Best to not use transmitter trims on APM anyway.
The Discovery is a great way to incorporate a camera or FPV because the wider spread of the front arms gives you a prop free straight ahead view without having to add a raised landing gear and lower camera mount.
Thanks for the comments and suggestions everyone, very helpful. I'm not 100% certain why it flipped like it did, but I was in stabilize the whole time until the end when I went to loiter. The suggested method when starting was to keep simple mode off at first although intuitively I wanted to use it but haven't so far. I have past experience with standard electric heli so not using simple mode isn't too bad I find the challenge is getting through the first few flights and calibration to get the quad fully stable. Since I posted this I have a number of short flights in the garage with no wind. I found that no matter what I did the "level" was off by ~10 degrees so I had to go in and set AHRS_TRIM_X/Y to zero and that was fixed. Now I'm contending with the throttle. I can find a sweet spot which lasts for 3-5 seconds then it starts to float up and down by about two meters doing a hop motion. If this continues after another battery or two I'll have to dig into what adjustments will be needed to fix this.
As far as the flame wheel goes that is great, I didn't realize I could grab the TBS Discovery plates would work fine with these flame wheels, maybe I'll grab that set of more room. Right now my 5000mah won't fit in between. I thought about fashioning something to make the feet a bit longer making room to mound the 3S underneath. Continued experimenting this weekend, we'll see how it goes! Oh and yup, I did go with the carbon filled GFs, Cheap and from these first two sets they seem like a decent daily driver. Thanks again!
The nice thing about the TBS discovery is that you needed a Flamewheel anyway.
The top and bottom plate (kit) is $75.00 and fits the F450 arms and other stuff fine.
I have an F330 and F450 Flamewheel and I really like them, modular, cheap parts and tough.
A suggestion regarding prop breakage, get some of the 10" or better 11" GemFans, they are carbon filled and a LOT tougher than most of the other inexpensive props.
Since it doesn't look like you are using DJI motors, you won't need the special 10" DJI compatible GemFan Props.
Graupner's may be even better, but they cost a ton and represent a much more significant personal hazard.
I generally bleed from installing or removing the, let alone using them.
I also find the 11" props a lot more efficient than the standard DJI 10" props as well and fit just fine on the F450.
I'm not sure whether your battery will fit through the middle part of the copter, but I got a battery just small enough so that it would and it does help stabilize the copter a bit having the CG a bit lower.
Just tape a little plastic sheet around they battery (or bubble wrap if it will fit) and you can also cover your bottom plate power distribution board solder joints with liquid electrical tape or silicone.
Just a thought, not a big difference.
It actually looked like you were doing really good especially considering the wind, you might want to try and keep it closer to you fr a while while you are learning even with the 2 white and 2 red arms, maintaining orientation with these is tough.
Best to use stabilize instead of Acro mode when learning. Or maybe you cut the power to make it flip? Also, Simple mode is handy for learners.
When starting out the throttle is key. Remember to find the center point that allows you to hover, then always return to that point. Watch for any acceleration up or down. Uncontrolled acceleration is deadly when you are learning.