I finally translated all the website of my home-made UAV in english.
http://heli.bot.free.fr/index_en.html
Do not hesitate to post any question or comment about the UAV, about my work, or about the website!
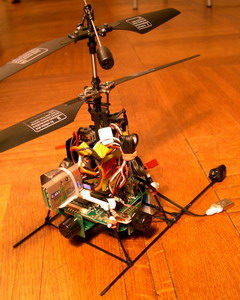
Remember that this small UAV is totally home made, and do not come from any other project.
100% of the code is programmed by myself.
Have fun!
Leon - French hobbyist.
Comments
> Whoever does a line following copter will be the 1st.
Here is a helicopter that does line following.
https://www.youtube.com/watch?v=CEkcA-_ji10
Downward facing camera guidance is done all the time, but it's surprising no-one has thought of using markers on the floor to guide it through a building. Whoever does a line following copter will be the 1st.
Okay, sounds logical!
There is no need of a sensor at the rear. The UAV can rotate so that it always faces 1 whall in front. Furthermore, I decided to put battery at the rear of the UAV, and it would have been difficult to incorporate another US rangefinder.
This is really interesting Leon. I have to congratulate you. Is there any reason why you did not incorporate a fourth sensor on the rear ?
Also, those are some impressive soldering jobs!
@Jack :
With the sonars, you are right : I need to stay near a wall (up to or 3 meters is good).
But with the Wii-camera, if several IR spots are put on the floor the UAV could theoretically navigate through a building. Unfortunately this doesn't work fine for the moment : at low altitude (under 1m), the field of view is too narrow, and at higher altitudes (over 1.5m), the precision is not good for x-y speed estimation. Some of my problems are due to the fact that the orientation estimation and the wii camera measures do not have the same delay. I am still working on this part.
Leon - French hobbyist.
That's $100 of sonar modules. That's the 1st time someone got this to work, but it needs to stay near a wall. The next step is map construction & navigation through a building.