I hadn't noticed this on Kickstarter before, and it appears nobody else did, either -- with just 60 hours to go they've raised less than $1,000 towards an $180,000 goal. (Maybe they should have posted on it here!). But it's an interesting idea -- just a UAV "pod" with the autopilot and camera, that you could add to any aircraft. It uses APM and a GoPro.
Perhaps one of the reasons it didn't get many backers was the pricing: $1,500 for what appears to be less than $500 worth of parts (APM + 3DR radios + GoPro).
Here's the Kickstarter listing:
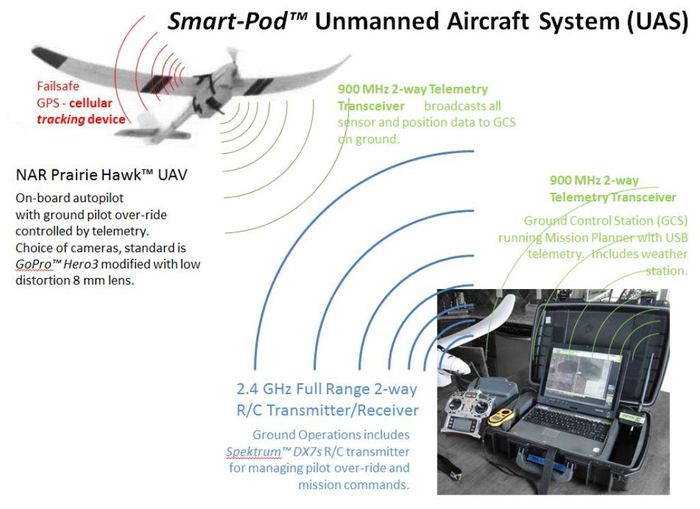
Smart-Pod™ is the core of a work-horse miniature Unmanned Aerial Vehicle (UAV) system. It elegantly combines a custom-fit mission pod (autopilot, avionics, instruments, cameras, etc.) with a ruggedized R/C aircraft making the UAV more affordable, easier to fly, safer to operate, and more practical to support. Coupled with a formalized UAV Pilot Training Program it represents a 'smart' way to enter the UAV field.
(note - the above video shows our North American Robotics' 'Prairie Hawk™' Smart-Pod-enabled UAV on its 85th mission, all with no damage, regardless of landings on asphalt, dirt roads, tilled farm fields, harvested corn fields, and both short and long prairie grasses. None posed any particular concern to the aircraft landing.)
* If the idea of operating a UAV has appealed to you - then you will welcome our practical approach and unique products.
* If you have been concerned that learning to operate a UAV is difficult - know that we designed our UAVs specifically to be well-behaved enough for the novice, but capable enough for the advanced UAV operator. We planned for someone who has never flown an R/C aircraft, nor gathered any aerial photography, as well as operators who need extensibility and flexibility. We integrated compehensive Ground School with an accurate UAV flight simulator and series of real world training missions to introduce the pilot to the flight characteristics of our UAVs, and to develop their skills. This approach works. If you're considering an entry in to UAVs - this will be and ideal start. If you are already confident that you know what you need, this will perform dependably season after season.
* If you have been worried about the dangers involved in UAVs -we make safety the watchword in operating a UAV/UAS. Our Smart-Pod's "soft" materials and light weight minimize its potential to cause damage, and its special design makes pod-enabled UAVs much easier to fly and land safely than a typical R/C aircraft.
* If you have been discouraged by the start-up costs associated with the few non-toy UAVs that are available - you will see the wisdom we used to keep start-up, operating, and maintenace costs low and manageable.
* If you want a Sci-Fi "drone" that flies itself and does all its own thinking - be prepared, you are pretty much what the FAA is working toprevent. UAV operation needs to be done with forethought, and with consideration of both public safety and individual privacy. Our line of UAVs is capable of nearly complete automated flight from launch to recovery, but the FAA discourages this. Our strategy is to blend human pilot management with the automated flight. We designed our approach to provide pitch and roll stabilization at all times making human control of the UAV smooth and unintimidating, with instant access to pre-programmed flight patterns to make complex missions easy to execute. Our system provides the UAV pilot with immediate over-ride at all times. This promotes the safest and most responsible of UAV operations.
What is a UAV/UAS?
An Unmanned Aerial Vehicle (UAV) is an aircraft, often a fixed-wing airplane, which can operate under its own control or under the control of a remote human pilot. A miniature UAV (MAV) is much smaller than a conventional airplane, and can be deployed close to where it is needed; often hand-launched and recovered. It can bring aloft cameras and other specialized sensors to gather aerial imagery, special infrared (IR) imagery, or atmospheric weather data. An Unmanned Aircraft System (UAS) includes the UAV and a Ground Control Station (GCS) of some form, along with a telemetry communication channel between the pilot, the UAV, and the GCS.
Who needs miniature UAVs and why?
A birds-eye view has always been valuable for inspecting property, managing resources, advertising and sharing a large-scale events (like outdoor celebrations or sports), and supporting scientific studies of a large or inaccessible area. Historically, this was accomplished by a hiring a private pilot and airplane, as well as a photographic crew, and securing a special permit to fly where the desired images could be gathered. This has beenextremely expensive, and severely limited what applications could afford it.
With a robust miniature UAV, a wide range of applications can be explored with comparatively affordable costs. North American Robotics (NAR) has been developing UAVs with special cameras and sensors for scientific environmental research projects, precision agriculture and improved farm production, real estate property inspection, municipal site management, and emergency response search support. Our goal is to make these rugged UAVs available as practical tools – the kind users can depend upon to perform, and afford to actually operate.
A different approach than other miniature UAVs
Many reputable groups and organizations are working to provide UAVs to the industries wanting to experiment with them, but the products available represent either wildly expensive ultra-high-end defense department type UASs or park-flyer near-toys, leaving the practical, “work-horse” of UAVs only to the do-it-yourself-ers. If UAVs, especially miniature UAVs, are to get into the hands of regular people interested in developing new applications and new industry, then a product line needs to be provided that is affordable, rugged, tailor-able, safe, and most importantly – supportable.
To be rugged, a UAV needs to protect the autopilot avionics, instruments, and sensors - making certain they can operate effectively and that they are secure throughout the mission, from transport, to deployment and launch, through to landing and recovery.
To be supportable the UAV needs to be serviceable and ready any time the weather permits safe operations". This is very difficult if a UAV is so unique there is only one vendor to support it, and only one place from which to get spare and replacement parts. That means stepping back away from designing yet another unique special-purpose limited-availability aircraft andinadvertently becoming the very bottle neck of parts and support that hold back application development.
What has been missing is a capable and robust manner of bringing popular airframes and the autopilot electronics together to make a “pick-up truck” UAV, a FORD F-150* of the miniature UAV industry. At North American Robotics we have done just that by following a proven approach that has been employed by the U.S. Air Force, NASA, and our own DOE R&D for decades - an air-borne mission pod.
(*FORD F-150 is a registered trademark of FORD MOTOR COMPANY. Its use here is intended as a compliment to their product line, but does not imply endorsement or support from FORD for this project)
In the mission pod approach, all of the costly and vulnerable avionics, sensors, flight control instrumentation, and telemetry electronics are carried in an aerodynamic, ruggedized, crash-survivable pod slung beneath the aircraft’s hull or fuselage. Furthermore, the pod is designed to be the landing gear of the UAV. The airframe is left virtually unchanged, while the mission pod mounting is designed to not interfere with the aircraft center of gravity (CG) or any other flying characteristics. The demonstration aircraft chosen have been capable and popular R/C aircraft, with a wealth of replacement parts and options readily available. The example instruments (cameras and sensors) include popular series sport cameras with optional mission-tailored lenses and weatherproof impact-resistant polycarbonate cases.
We call our approach the "Smart-Pod" Modular UAV, because it is the "smarts" of the UAV. It is also a smart approach to building a practical UAV.
The early Smart-Pods looked like this - a solid block of high-impact EVA foam with cavities machined in to exactly fit the autopilot and other avionics that get housed inside.
The Smart-Pod is attached to the strongest areas of the host aircraft to create the rugged UAV. It is shaped to be aerodynamic, and to serve as an effective landing sled to protect the instruments and the aircraft.
The final cost of our turn-key Smart-Pod UAV is a fraction of the $15K-$20K cost of comparable mini-UAVs on the commercial market today.
We've already constructed six (6) prototypes of the full 2-meter wingspanPrairie Hawk and Prairie Hawk Pro Smart-Pod UAVs, using three (3) different commercial R/C electric powered gliders. We flight tested them in over 100 sorties (launch/fly mission/recovery) and developed a method to strengthen and ruggedize individual components. In our UAV prototypes the mission pod configuration both improved the flight stability of the aircraft as a sensing/camera platform, and dramatically increased the UAV's ability to land without injury in unimproved field conditions. It made all the test aircraft significantly easier to fly in both autopilot and in manual modes.
Smart-Pod simple integration to aircraft
Smart-Pod in operating position
Video of Smart-Pod UAV
We have made the Smart-Pod UAV part of a complete organization of service, training, and support for individuals and groups deploying and operating miniature UAVs for academic, agricultural, industrial, municipal, and commercial applications. (See video above and more on YouTube.com. http://youtu.be/lPNOSuqMYTQ
)
Smart-Pod design approach
We have introduced miniature UAVs into our research involving atmospheric emissions monitoring, aerial pipeline inspection, and ground vegetation damage analysis. For our applications we've operated from all types of terrain – plowed farm fields, unimproved roadways, military tank training grounds, rural prairies, and hard-packed deserts. None of our field sites included a nicely mowed thick carpet of soft grass in a city park. Because of this, we had two primary design criteria:
· the UAV needed to deliver the desired electronics and payload over the region of interest long enough to gather the data needed, and
· the UAV needed to be easy to launch and rugged enough to land on any terrain, and also easy to repair if and when some damage occurred.
“Safety” was a major concern, both to the aircraft instruments and to the people and property on the ground below where the UAV would be flown. These practical criteria led us to the adoption of existing, popularExpanded Polyolefin (EPO) and Expanded Polypropylene (EPP) R/C airframes and the use of light and durable Ethylene-Vinyl Acetate (EVA) foam for the mission instrument pod. These two materials were substantially unaffected by any weather conditions, retained their shape and strength throughout a wide range of ambient temperatures, remained easy to machine and work with, and would cause minimal damage during a crash.
Each component of the commercial airframes was “ruggedized” to increase its strength and resistance to abrasion expected during belly landings at unimproved fields. Each of these modifications allowed the component and the airframe to bear more load weight and flight stress and endure more punishment – all vital to a practical work-horse UAV. It was not however “required” for UAV flight and operations under normal condition and the aircraft can be flown with virtually un-modified commercial parts to prevent being grounded during an important mission. It simply performs better and safer with the ruggedized components.
We selected a motor and ESC that had braking capability, coupled with a folding plastic propeller that would minimize any injury danger.
We enveloped our Li-Po batteries with a light-weight fire retardant material to protect the airframe and the surrounding ground covering and property from fire in the [unlikely] event of a hard crash.
Smart-Pod advantages
By separating the autopilot electronics and camera/sensor instruments from the hull/fuselage, and enclosing them in a container specifically designed to protect them, then the largest expense in fielding an UAV was also made the most safe and most durable.
By making the pod easy to add to any suitable aircraft available the plane actually becomes expendable, and even in the event of a complete catastrophic crash, could be replaced with a trip to the local well-supplied hobby store putting the mission back on track in a matter of hours.
The pod design itself can be tailored to fit and deploy a wide range of commercial cameras and experimental instruments – contact NAR and discuss this important advantage.
Replacements for any vulnerable parts can be carried along, but are often repairable in the field with supplies available from local hardware stores.
NAR supports and promotes the open-source ArduPilot Mega (APM) autopilot and Mission Planner Ground Control Station (GCS), which together allow visual graphical planning of complex flight missions directly on a photographic map. NAR modifies both the autopilot to tailor it to the airframe, and the Mission Planner to make it easier to use.
NAR Prairie Hawk and Prairie Hawk Pro turn-key UAVs
NAR Ground Control Station - in Pelican case w DX7s Tx
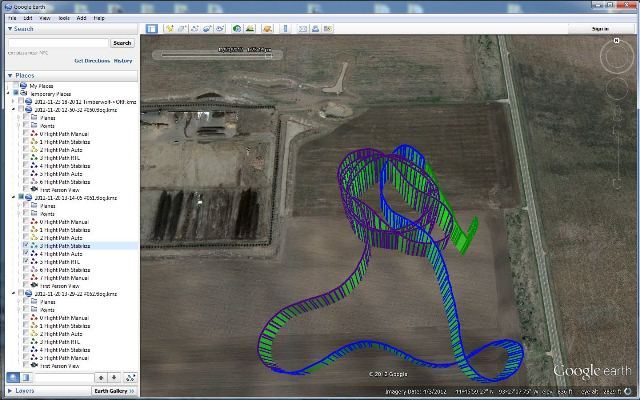
The GCS with the Mission Planner allow the UAV Pilot to visually plan the AUTOmated segment of their flight. This is done in a point-and-click fashion placing waypoints (WPs) on a satellite map displayed in the Mission Planner. The mission is uploaded to the UAV and assigned to a programmable switch on the DX7s Transmitter. During the flight, the Pilot only has to press the switch to initiate the automated mission. Here is an example of a trivial training mission with 3 WPs and Return To Launch where the UAV circles until the Pilot takes control and lands.
After the flight, the Mission Planner allows the Pilot to examine the Flight Data Log and chart the course as-flown in GoogleEarth. Here, the mission can be inspected to determine its accuracy and improve planning for future missions.
The U.S. Federal Aviation Administration (FAA) govern the U.S. air space. They are still writing all the new policies concerning operation of UAVs in the U.S. air space. An important aspect of their current regs is having two people, a pilot and co-pilot, both operating the UAV. Our approach makes the most of this by allowing the two operators to work together. The pilot is in control of the Transmitter and flies the UAV in traditional R/C fashion, triggering pre-programmed flight modes as needed. The co-pilot operates the GCS, and via the telemetry, sees a virtual dashboard with flight instruments and can track the UAV real-time on the displayed map. BOTH can control/over-ride the UAV with complementary controls. It is a system that allows either one to operate, and for simpler missions the Pilot with Transmitter can operate the UAV alone.
The launching and recovery of our UAVs has been made as easy and predictable as possible, and will allow the Pilot to focus on the purpose of their mission.
If the mission is simple aerial photography, it can be gathered using look-forward, look-sidesways, or look-down versions of the pod - whichever is needed for the mission.
Below is a satellite photo of our testing grounds - all other images were captured from our UAVs at different altitudes over this test ground. The RED and YELLOW circles illustrate the precision we are capable of - maintaining and repeating a circular path many times for close area surveillance.
The above image... zoomed in with as-flown flight path overlaid. .
An example shot from approx. 200 m Above Ground Level (AGL) produces approximately 10 cm/pixel ground resolution - this is routine.
Oblique photos taken during LOITER around this site.
For these images, the UAV was pointed into the prevailing 20 mph head wind and allowed to 'station' itself over a fixed point on the ground. It can do this with or without the motor operating.
A quick inspection of the chase vehicle... and pilots on the ground.
The following is a description of the North American Robotics UAV/UAS equipment you can receive.
The Smart-Pod Mission Pod. This is the core component upon which we build the UAV and the UAS. This rugged pod houses the autopilot, avionics, sensors, and camera. We have intentionally test-crashed this from over 100 ft altitudes crashing at 30 mph and destroyed aircraft, but protected all internal instruments.
The Prairie Hawk and Prairie Hawk Pro UAVs. These start as commercial R/C powered gliders, but become work-horse UAVs after some ruggedizing and the attachment of the Smart-Pod with the avionics. The Smart-Pod stabilizes the aircraft making it extremely easy to launch, fly, and recover - often with no more pilot control than speed and steering.
The Ground Control Station can be any of a variety of notebook PCs, brought to the field in a ruggedized Pelican case. The GCS communicates with the UAV through the [XBee or non-XBee brand] 900 MHz transceivers. All flight data is thus recorded on the GCS using the Mission Planner. The Mission Planner is software running on the GCS. Inside the Mission Planner the UAV pilot can see a satellite map or drawing of the area they plan to fly. They plan a mission by placing Way Points on the map and assigning step by step actions to execute (such as 'loiter' around in a fixed diameter circle at a fixed height for a fixed period of time) typically ending with Return to Launch place.
The Transmitter we prefer is the Spektrum DX7s or DX8. This is the over-riding control between the UAV Pilot and the GCS/UAV. The switches on the Transmitter will be pre-programmed, and allow the UAV Pilot to switch between Flight Modes. With the flipping of a switch the UAV Pilot can make the UAV loiter or simply fly in a circle above his or her head (taking pictures). With the flipping of another switch, the UAV will come home from wherever it is, and with the switching of another switch the UAV will execute a pre-planned mission, much like turning on a cruise control on a car. When the pre-planned mission is complete, the UAV returns home, where the UAV Pilot can bring it in for landing.
The Smart-Pod makes the UAV much much easier to land than a normal R/C plane. Most of our landings are "hands-off" with the autopilot stabilizing the UAV, all the propeller power off in a full glide, and the pilot only responsible to steer left and right. The Smart-Pod provides a firm strong surface on which to land and protects the UAV from all but the most poorly executed landings. We configure our UAVs to land themselves if a failsafe is triggered.
We have done the work in configuring and tuning the aircraft, but each UAV Pilot must still accept responsibility for all of their aircraft's actions. The FAA also recommends flying UAVs in pairs with a Pilot and Co-Pilot both in control of the UAV.
Links to many more videos and images will be available very shortly on the updated North American Robotics website.














Comments
Greetings esteemed fellow UAV enthusiasts,
Oddly - a year later - I've only just stumbled on this entire post, while I was looking at DIYDrones for something else. I'd NO idea my brother's endeavor was going to generate the mixed (mostly negative) feedback Chris' copy/paste post from Kickstarter has. I'm compelled to respond with the following comments to help clarify some ignorance or missed observations:
Chris - even your comments came as a surprise. I wonder how you would have responded if other people seeing the original DIYDrones effort chose to comment like you just did. I'm disappointed in you. Nobody asked you to copy/paste an entire Kickstarter page onto your website, only for you (and several others) to take (ignorant) potshots at it. Do you do this for everyone trying to do his or her part to push the envelope on UAVs? Are you SO certain you fully understand the purpose under this effort? I would respectfully submit that you speak out of ignorance...
- this overall project had numerous design goals which appear to be unfamiliar to those who have commented negatively. It may have been more prudent on your part to simply ASK questions of him. Instead you appear to have chosen to first make assumptions, and then comment (wrongly) based on your own assumptions;
- these goals account nicely (intelligently) for the final design, it was arrived at methodically and defensibly by a PhD researcher with nearly 25 years of government research, 200+ publications, 6 patents, and the (regular) ear of the Director of Homeland Security;
- gouging-out the fuselage & wings will NOT meet these goals;
- the project goal of $180,000 also has an entire business case behind it; Contrary to some viewpoints, Kickstarter is about seeking crowd-sources funding for projects which are not complete, and which require funding outside the means of those seeking the funding. Many try to use Kickstarter to simply "sell" already-completed devices (e.g. the ubiquitous 3-D printers come to mind), but Michael was seeking funding to actually complete his project, meaning molds for mass production (surprisingly expensive), as well as additional effort to take a POC prototype lens filter and innovative Vegetative Analysis algorithm through to production, and to incorporate use of his AI-enabled ceramic gas sensor research (some 20+ years at Argonne National Lab) into this very module to create a platform for numerous types of flying sensor arrays for both private and government use.
I think some of you might have "got" what was going on here, and I very much appreciated your comments.
The rest of your seem to simply enjoy first making your own assumptions, and than taking potshots based on your ignorance of the actual goals. Please enjoy knowing the first KickStarter effort was indeed unsuccessful... but the self-funded research has led to billable work which has enabled Michael to increase his entire fleet to about 33 vehicles so far, and win contracts with various municipal agencies as well as government labs. These entities must know something you all don't.
Chris - I would ask that in the future you refrain from copying/pasting the work of others if your only intent is to lambast them. No one is doing that do you, and thus far Michael & I have only contributed to the DIY effort (with a few minor code improvements in the MissionPlanner), and have done nothing to harm you or poke fun at any of your efforts. In fact, what I would prefer is that you delete this entire thread from beginning to end, and replace it simply with a link to the original KickerStart project URL, and let everyone else do their own research and make up their own minds.
Respectfully,
-Mark Vogt
I am building a pod to my Meridian 10CC gas airplane. My objective is to have a convertible airplane - without the pod for more sport fun and with the pod for UAV fun :D

And I plan do design the pod to be convertible by itself, like this:
Pod designs are not new, they are tried and true in many cases. But this looks like someone looking for financing but without the resource to properly execute the base design and development. Also as other stated, $180k is not required for such a simplistic startup/kickstarter. Wayne Garris is the proper example of the right way to push forward on a project like this.
Its funny because our student team did the same thing for AUVSI's SUAS competition with a Radian, but we managed to carry everything they have within the fuselage without strapping a foam pod to the bottom, including the GoPro.
The project looks like a very good Idea. Grab and go UAV for existing RC airships, but what's the 180k for ? Looks like its done, so is that for the mass production???
Not trying to be a downer at all because I will need help with my project here in the next 6-7 months, and was planning to do the same as far as posting the prototype to Kickstarter and DIY drones.
But I will be needing help because my prototype (once finished) Will regenerate electrical current back to the battery as it flys, have a payload of 50pds, cruise speed of 55 max at 77, telemetry via satellite, Reg.night and thermal vision, and will be able to communicate with Police, Fire EMS. SO YEAH I WILL BE NEED'N SOME HELP. WE ARE JUST FINISHING TESTING ON THE REGENERATION SET UP and CONFIMING STATIC THRUST PER MOTOR. Pray for US LOL!
I can see your point about the modularity. But if you break the fuselage, and remove your avionics pod, you sill still have to set up servos on a new airframe, pod or not.
But OK, so the modularity part has some merit. I would prefer to see an airframe designed with the pod designed in from the start. Actually, it wouldn't be hard to make a modular avionics assembly for something like a Skywalker. You should see what I do to my APM's. They end up being quite compact, with the Rx built right onto a daughterboard. Etc. The only connections to make are the ones you'll need to do anyway.
-Servos
-Power Supply
-GPS
-Telemetry
etc.
I think if this was the goal, why not design an avionics package, with the bare minimum of external connections, build it all into a plastic case, put the case in the fuselage. Done.
@ R_Lefebvre: the "blob under a high efficiency glider" concept can be very efficient, way more than other airframes actually.... I'm not justifying here this Kickstarter project which is asking $180.000 for a foami pod on a glider. Ther are other advantages of a pod design that can be important to point:
- Modularity: if you brake the fuselage, you can change it quickly provided most of the electronics is in the pod. Time on the field is money when you are flying for business. In a convetional UAV if you brake the fuselage you have the reinstall all the electronics, and most surely resetup servos, etc... depending on the installation it can take lots of time.
- Customization: you can have standard wings and fuselages. And customize only the pod. This reduces cost and expand the flexibility of the system.
+1 on that I always think you would be better off cutting a hole in the side of a big standard trainer to look out of. Yes by all means make a glider and widen the fuse but cram everything in, nah.
I'm really not a fan of the "bolt a blob under a high efficiency glider" design. It seems like it removes all of the efficiency of the airframe, while still being fragile and not giving you any room in the airframe. As ugly as it is, the Skywalker design is must more practical.
You can buy a Ardu plane right here on this web site ready to go for $549. You could buy a lot of Radian pro's or Blixers for $180 000 A lot of money considering After 70 flights the wings on a Radian pro go to mush if you pull any "G's at all. The reason they separated the pod from the air frame there is no room in a radian to put any thing .Using cheap construction foam for the pod and Velcro straps maby the pod is designed to break away when it crashes? Nice paint job on the canopy!
-
1
-
2
of 2 Next