Evan Ackerman at IEEE Spectrum reports on new research that suggests that a large central rotor (like a helicopter) combined with with three smaller control rotors is a more effecient use of four motors than the conventional quadcopter configuration. They call it a "Triquad":
As cool as quadrotors are, in most cases they're simply not as good as helicopters. Because of the way they're designed (with four small rotors instead of one big one), they're less powerful, less efficient, and less maneuverable. The power and efficiency issues come from the fact that one big rotor generates more lift per aircraft footprint than four small rotors, and as for maneuverability, a helicopter that can alter rotor pitch instantly will always outmaneuver a quadrotor that can only control blade speed. Seriously, try doing this with a quadrotor.
So, the thing that quadrotors have going for them is that they're simple. Helicopters have complex main rotor heads, with shafts and bearings and linkages all over the place, while quadrotors just have four motors and that's it. The University of Queensland researchers came up with a "Y4" configuration that aims to take all the good bits of helicopters and make them as simple as quadrotors. I'm just going to start calling this new design a triquad. Keep in mind that this is still a quadrotor: it just had things shifted around a little bit.
Almost all of the triquad's lift comes from its big main fixed-pitch rotor, located at the center of the "Y" (pictured below). The three little fixed-pitch rotors in the "Y" configuration are angled (at a fixed 45 degrees) to provide counter-torque (which they do slightly more efficiently than a helicopter tail rotor) along with pitch and roll control. Here's how the control works:
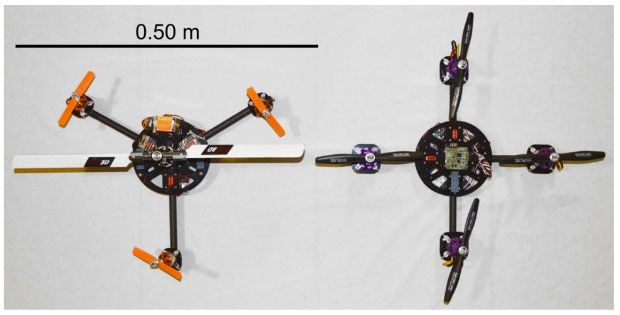
Crunching numbers suggested that the triquad would have an increase in performance (in terms of flight time) of about 25 percent over a standard quadrotor configuration. The researchers, being researchers, decided that the only fair way to test this hypothesis was through experimentation, so they built a triquad and a traditional quadrotor that were as identical as possible:
They had the same mass, the same footprint, the same mass devoted to actuators, the same chassis, the same arms, the same batteries, and the same flight controller. The researchers explained that the standard "control" quadrotor had an optimized design, while the triquad was not optimized at all (because its design was constrained to keep it as similar as possible to the control quadrotor). This gave the control aircraft an advantage in power of about 9 percent.
Even with this disadvantage in power and a suboptimal design, the average current draw during hover was over 15 percent higher for the control quad, which translates into a 15 percent increase in flight time for the triquad design. The researchers think that with some tweaking, that theoretically calculated 25 percent increase should be achievable.
"Towards a More Efficient Quadrotor Configuration," by Scott Driessens andPaul E. I. Pounds from the University of Queensland, was presented last week at IROS 2013 in Tokyo, Japan.
Comments
Yup, I'm also going with BiTri...'cuz it's really so much cooler looking.
aniti-gravity - we NEED anti-gravity......
timmy
Acutally, I just realized something after reading Harry comment.
The TriQuad might be doomed. While those little motors might be capable of controlling the attitude in a hover, in a windless environment, I'm not sure that they would be strong enough to withstand the aerodynamic forces on the main rotor disk during any kind of flight with relatively high airspeeds. There is a VERY strong flap-back force that happens to a main rotor.
Further, those little motors will have to be strong enough to counter the roll moment created due to disymmetry of lift during forward flight. This is actually a big part of the swash-plate's job.
Make that BiTri's forward motors tilt and maybe have the main rotor free wheel capable like a gyrocopter. Yeah, that's the ticket.
Armchair engineer here: I might debate the relative merits of a quad and a triquad, but I am not going to take on heli.
Like your BiTri though.
I see your TriQuad, and raise you a BiTri:
As for this paper, I'll have to try to find the time to have a good look at it. I'm not going to bother armchair engineering it until then. :)
For reference, last night I discovered that the quadcopter hovering record has (I believe?) been shattered by a helicopter, quite some time ago. 2 1/2 hour electric helicopter flight:
http://www.twheli.de/modelle/weltrekord-logo-600-se/english/
And I should note that, with the twist of a speed control knob, this machine would actually be capable of carrying a substantial payload, something the Duration Special quads cannot.
While there is certainly reasonable support and utility in this design I am not at all convinced that substantiates a generic proposition that a triquad is always more efficient than a quad copter.
The air is a fixed response medium and things of different sizes, weights and diameters behave differently in it.
Generally speaking bigger propellers can produce more thrust per unit power than small ones ergo the success of the larger blade in this instance.
But the central body they used was especially large in diameter limiting the size of the propellers they could use in the quad to covering a small swept area in comparison to the central rotor they used.
If they had used a design that would have permitted the tips of the Quad blades to have nearly intersected they could have used considerably larger propellers with a much greater swept area.
Also the quadrotor blades that they used were certainly not optimized for efficientcy unlike the blades in Paul Pounds "more Efficient Quadrotor Configuration presented at the bottom of the Blog above.
On the other hand, neither was the central rotor on the triquad.
All that aside, it is probable that in some size range that the triquad is likely to be generally more efficient than a specified equivalent quadcopter.
But the above design has unfairly hobbled the supposedly "optimized" quadcopter by using such a large central deck that they had to use small diameter props on it to meet their self described size limitation.
If the size limitation is removed I think the quadcopter would for hover at least always be more efficient because you could use large enough blades to overcome the Triquads one advantage.
And the triquad also has losses due to the interference of the primary rotors thrust by the 3 small rotors as well.
In a tightly specified contest specified to favor the triquad I think the triquad might commonly win, however I think the same is true for the quadcopter if the specifications are tailored for it instead.
That having been said there are probably uses and capabilities that the Triquad is better suited for than a quad copter (using a gas engine for instance).
@Unnamed Idea, If you move the Quad or TriCopter Props far enough away from the middle traditional heli prop you can gain the Efficiency of Traditional Quads, the stability of Multis, and the safety of multicopters. IMHO large traditional helis are the most dangerous because they are affected highly by wind and weather much more easily than a multi is.
But isn't the outweight part of multicopters that they are much more safer compared to the helis ( because of the reduced blade diameter)? If you want more efficiency, then just go towards trad. helis. To me, this" triquad" has heli's danger and multi's unefficiency :)
I have actually noticed this myself. When I was designing and working on a triquad type boat/heli design the dual heli props in the middle are way more efficient than just building a boat shell around a conventional quad.
-
1
-
2
of 2 Next