 for this demo I used 3.3v as power source for the receiver but in real life it will probably be a 5v power source so you'll need to figure a way how to do it (resistors, level converter...)
for this demo I used 3.3v as power source for the receiver but in real life it will probably be a 5v power source so you'll need to figure a way how to do it (resistors, level converter...) 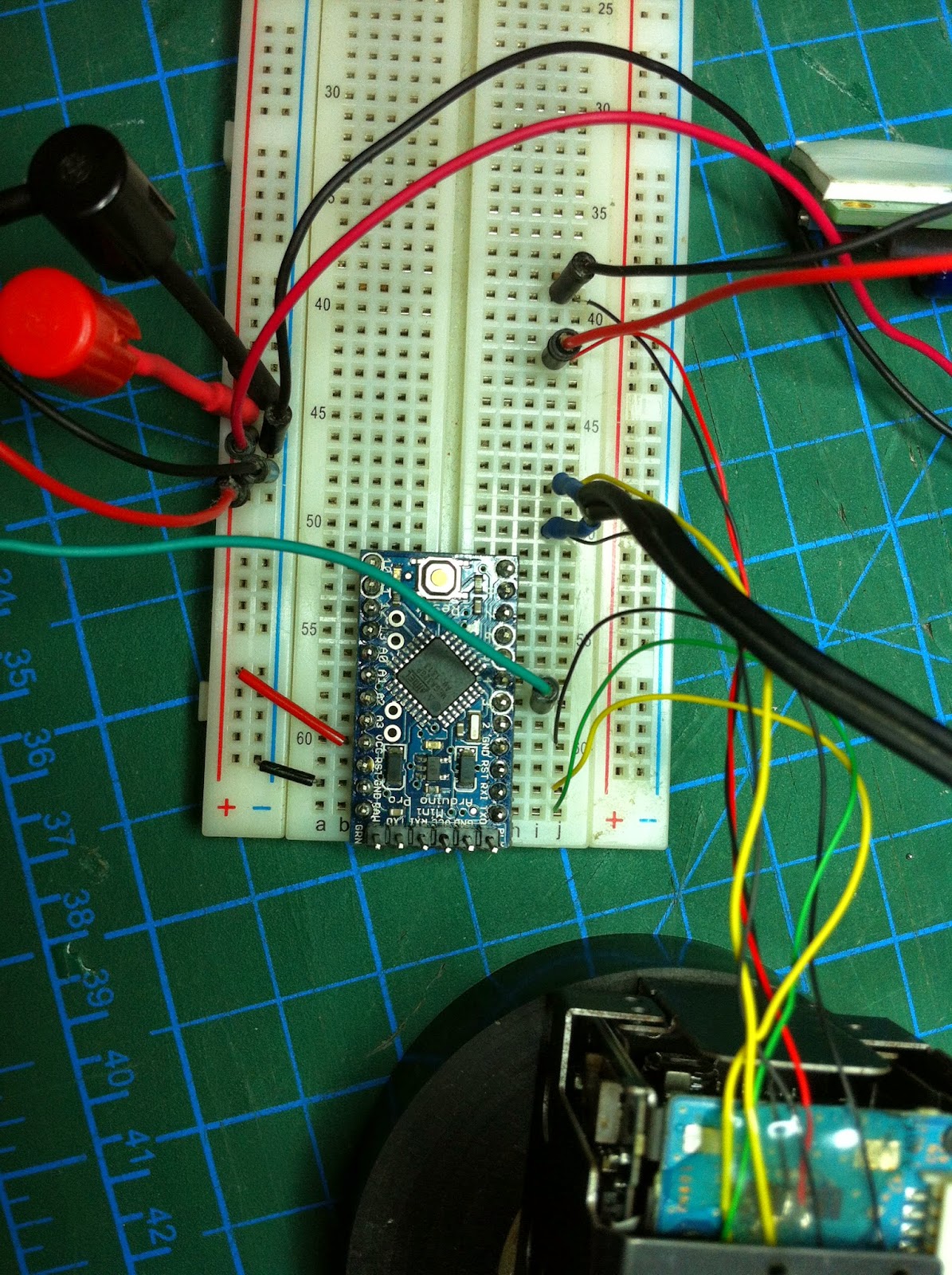



and of course the code :)
/* build and tested using
sony camera block fcb-ex11d and
rc transmitter spektrum dx6i with
ar6200 reciever and connected to the elev channel */
byte address_set[4]= {0x88, 0x30, 0x01, 0xFF};
byte if_clear[5]= {0x88, 0x01, 0x00, 0x01, 0xFF};
byte command_cancel[3]= {0x81,0x21,0xFF};
byte zoom_teleVar[6]= {0x81, 0x01, 0x04, 0x07, 0x23, 0xFF}; //zoom in 81 01 04 07 2p FF - p=0 (low) to 7 (high)
byte zoom_wideVar[6]= {0x81, 0x01, 0x04, 0x07, 0x33, 0xFF}; //zoom out 81 01 04 07 3p FF - p=0 (low) to 7 (high)
byte zoom_stop[6]= {0x81, 0x01, 0x04, 0x07, 0x00, 0xFF}; //stop zoom
byte auto_focus[6]= {0x81, 0x01, 0x04, 0x38, 0x02, 0xFF}; //auto focus
const int thisdelay= 250; //time between sets
const int zoom_out=3; //Zoom
void setup() {
pinMode(zoom_in, INPUT);
pinMode(zoom_out, INPUT);
// initialize both serial ports:
Serial.begin(9600);
//send Address set
for (int i=0; i<4; i++){
Serial.write(address_set[i]);
}
delay(thisdelay);
//send IF_clear set
for (int i=0; i<5; i++){
Serial.write(if_clear[i]);
delay(thisdelay);
}
}
//zoom in
void loop() {
int zoom_inState=pulseIn(3, HIGH, 25000);
if(zoom_inState>1550 )
{
delay(thisdelay);
//Send zoom tele set
for (int i=0; i<6; i++){
Serial.write(zoom_teleVar[i]);
}
}
//zoom out
int zoom_outState=pulseIn(3, HIGH, 25000);
if(zoom_outState < 1400 )
{
delay(thisdelay);
for (int i=0; i<6; i++){
Serial.write(zoom_wideVar[i]);
}
}
//zoom stop
if(zoom_outState < 1500 && zoom_inState > 1400 ){
//send auto focus cmd
for (int i=0; i<6; i++){
Serial.write(auto_focus[i]);
}
//send zoom stop
for (int i=0; i<6; i++){
Serial.write(zoom_stop[i]);
}
}
}
void sendcommand_cancel(){
for (int i=0; i<3; i++){
Serial.write(command_cancel[i]);
}
}
next thing will be to import it to attiny85
will release the code later tonight
**got really cool board that im using called attami (google it :) )
i was told that it will cost 1euro (not assembled)
and will be available at c31c (chaos communication congress #31)
/* build and tested using
sony camera block fcb-ex11d and
rc transmitter spektrum dx6i with
ar6200 reciever and connected to the elev channel */
#include <SoftwareSerial.h>
#define zoom PB0 // zoom
#define rxPin PB1 // rx
#define txPin PB2 // tx
SoftwareSerial mySerial(rxPin, txPin);
byte address_set[4]= {0x88, 0x30, 0x01, 0xFF};
byte if_clear[5]= {0x88, 0x01, 0x00, 0x01, 0xFF};
byte command_cancel[3]= {0x81,0x21,0xFF};
byte zoom_teleVar[6]= {0x81, 0x01, 0x04, 0x07, 0x23, 0xFF}; //zoom in 81 01 04 07 2p FF - p=0 (low) to 7 (high)
byte zoom_wideVar[6]= {0x81, 0x01, 0x04, 0x07, 0x33, 0xFF}; //zoom out 81 01 04 07 3p FF - p=0 (low) to 7 (high)
byte zoom_stop[6]= {0x81, 0x01, 0x04, 0x07, 0x00, 0xFF}; //stop zoom
byte auto_focus[6]= {0x81, 0x01, 0x04, 0x38, 0x02, 0xFF}; //auto focus
const int thisdelay= 250; //time between sets
void setup() {
pinMode(rxPin, INPUT);
pinMode(txPin, OUTPUT);
pinMode(zoom, INPUT);
// initialize both serial ports:
mySerial.begin(9600);
//send Address set
for (int i=0; i<4; i++){
mySerial.write(address_set[i]);
}
delay(thisdelay);
//send IF_clear set
for (int i=0; i<5; i++){
mySerial.write(if_clear[i]);
delay(thisdelay);
}
}
//zoom in
void loop() {
int zoom_inState=pulseIn(zoom, HIGH, 25000);
if(zoom_inState>1550 )
{
delay(thisdelay);
//Send zoom tele set
for (int i=0; i<6; i++){
mySerial.write(zoom_teleVar[i]);
}
}
//zoom out
int zoom_outState=pulseIn(zoom, HIGH, 25000);
if(zoom_outState < 1400 )
{
delay(thisdelay);
for (int i=0; i<6; i++){
mySerial.write(zoom_wideVar[i]);
}
}
//zoom stop
if(zoom_outState < 1500 && zoom_inState > 1400 ){
//send auto focus cmd
for (int i=0; i<6; i++){
mySerial.write(auto_focus[i]);
}
//send zoom stop
for (int i=0; i<6; i++){
mySerial.write(zoom_stop[i]);
}
}
}
void sendcommand_cancel(){
for (int i=0; i<3; i++){
mySerial.write(command_cancel[i]);
}
}
Comments
great little camera - thanks for the link
different interface (i2c)
would love to try it once ill find a good deal for it
Want one of these for myself for sure!!
https://www.youtube.com/watch?v=WFYUkBSyMsg
right.. didnt check which revision i uploaded
just add const int zoom_in= 4 ;// or any other input pin
after
const int zoom_out=3; //Zoom
Hi ,
i have this problem !
sketch_dec19b.ino: In function 'void setup()':
sketch_dec19b:16: error: 'zoom_in' was not declared in this scope
Peter
Hi Elad,
I looked at the Visca protocol and there is actually a command to send preset zoom positions to the camera. The command is called “Cam_zoom direct” and it is described on page 31 of the document you provided.
Cam_zoom direct: 8x 01 04 47 0p 0q 0r 0s FF
The p, q, r, s values are the preset x2, x4, x6, x8 zoom positions
If these values are combined with preset PWM values on one of the RC radio switches we can probably use a switch to set the camera zoom.
i dont think that there is a visca cmd to do what you ask
but you can program it for a specific ppm
featured on hackaday
Excellent work and documentation! A very useful project for the community.
I was wondering if there is a way to control the camera zoom level i.e. x2, x3…etc, by sending absolute PWM values for each zoom level. That would certainly be a huge added value.
Good work elad. I too was working on a similar unit (FCB-EX980SP) up to eighteen months ago. Other things took a greater priority as they do! Your post has prompted me to revisit this. Although I have not yet attached it, I also purchased a stabilization output module so I can use as much of the superb zoom these cameras have as possible!
Excellent work !
I have been looking for an implementation like this for some time now. I have a Sony FCB-EX1010 and by using the support PDF, I should not have much difficulty making it work with my setup. I was also thinking about a way to wrap some of these commands into a MAVlink stream and have access to some of the other features of my camera such as switching between NIR and full color, similar to the features I'm used to with the RQ-7b system I operate.
Thank you very much for this!!
-
1
-
2
-
3
of 3 Next