Hi all,
I cannot arm ESCs in stabilize, acro and simple modes. Each turning on the green led stays off for about 5-10 secs, than green-red are blinking, and than green blinks (is this "one-time ESC test"?). Moving rudder left or right for 2-10 seconds does nothing, green still blinks.
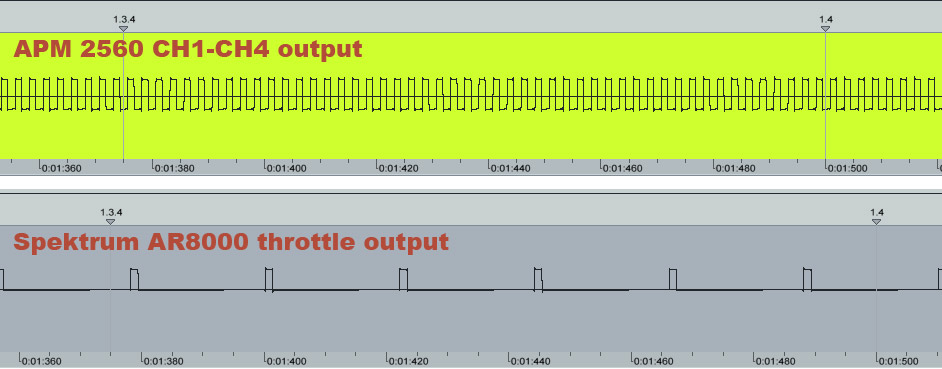
There's ~400Hz PWM signal (not 200) from outputs 1,2,3,4,7 and 8 - all are motor outputs, I think. Outputs 5 and 6, however, stay normal and happily drive camera stabilizer servos.
I've downloaded the latest Mission Planner, burned APM with Arducopter 2.0.50 (quad X). There was no major issues in setup process. Except "Missing RC Rev param" alert, but the program correctly displayed the movement of Tx's sticks. Also, no reverse checkboxes saved. But I was able to adjust all necessary params in the transmitter. However, both modes selector and leveler were allright. Manual calibration passed as it was expected.
Automatic calibration: green led is not blinking, motors beep 123 instead of usual 123-1.-1..-1... and no calibration happen.
My setup: "Arducopter kit, completely assembled and tested" with no additional sensors, Pentium-30A ESCs, Spektrum DX8+AR8000, running at conventional 22ms interval. Pentium-30A, connected directly to AR8000's throttle output, behaves as expected.
Connected to any of motor outputs with that abnormal PWM, it starts to slowly rotate motor, as at 1100-1200 CV. An analog servo, connected to the same output, have burned out in 5 minutes with very bad smell. And there's motor log:
START UP
DATA: 10, 4600
DATA: 11, 4600
DATA: 12, 145
DATA: 13, 145
MOT, 1100, 1100, 1100, 1100
MOT, 1100, 1100, 1100, 1100
---same strings, no matter what I've done
MOT, 1100, 1100, 1100, 1100
MOT, -1, -1, -1, -1
Replies
i fixed it by going into servo set-up on the DX8, select the throttle, and increase the travel param to 110% at each end of the range.
hope that helps
I realized that thisi is a common problem and still nowhere a solution given:
one
two by jerlac2
three and more from 1st coment. Arming doesn't happen.
Maybe I should buy another Ardupilot Mega?
It worries me you've reverse some channels.
Enter CLI mode and go to:
cli]test
test]radio
Right roll and pull back on the stick should output about 4450.
Right Yaw should output about 4450
Note the position of CH7 switch. the default position should give you a low value.
Jason