Hi guys!
I recently had a chance to test out YDLIDAR X2, that could be a cheaper alternative to RPLIDAR. Here are some of the characteristics of this unit:
| Parameter | Value |
|---|---|
| Scanning range | 360° |
| Range | 0.1-8m |
| Range resolution | 2% of distance |
| Scan frequency | 5-8Hz |
| Range frequency | 3000Hz |
| Max current | 500mA |
| Laser wavelength | 775-795nm |
| Laser power | 3-5mW |
| Price | ~89 USD |
I only tested it for an indoor SLAM (with ROS and Google Cartographer) getting a result as you can see above
I think this sensor might be an interesting option for obstacle avoidance (although I'm not sure if the 7Hz update rate is good enough). If anyone thinks adding this LiDAR to ArduCopter obstacle avoidance supported devices then let me know and I'll look into implementing it!
If you'd like to know more details then check out my blog post: https://msadowski.github.io/ydlidar-x2-review-ros-cartographer/ , where I also link to the repository with my Cartographer setup.
If you have any questions about the unit let me know and I'll answer them. I'm also happy to run some tests for the community!
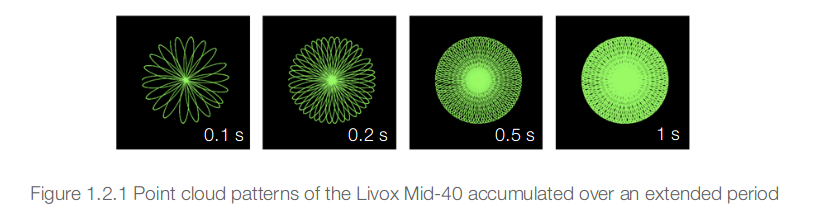
 Hi guys! Recently I had a chance to experiment with Livox Mid-40 - a 230 m range LiDAR using rotational Risley Prisms.
Hi guys! Recently I had a chance to experiment with Livox Mid-40 - a 230 m range LiDAR using rotational Risley Prisms.