Rustom Jehangir's Posts (7)
Sort by
Hello everyone! The ArduSub development team is proud to announce our third stable release with a number of new features and reliability improvements. This release is also important because it is the first time we are synchronously releasing ArduSub, the Companion WebUI, and a special Blue Robotics build of QGroundControl.
Here are a few highlights from the new features.
ArduSub:
- Support for the Bar100 pressure sensor, enabling dives to 1000 meter depth
- Improved failsafes for better reliability
Companion WebUI:
- Support for external positioning systems including the Water Linked Acoustic Positioning System
- Improved one-click update process for the WebUI
- Enable reset to factory defaults
- Companion computer monitoring
"Companion WebUI" is our companion computer configuration and update software, on it's second official release.
QGroundControl:
- More ArduSub-specific instruments available in the side panel
- Custom logo at the top right for company branding
- Support for boat/ROV positioning on the map
- Improved video recording user interface
- Recorded video size limits
For more details, please read our forum post about the update!
The ArduSub-powered BlueROV2 in a recent dive to 340 meter depth off the coast of Santa Barbara.
(https://www.kickstarter.com/projects/847478159/the-t200-thruster-make-100-limited-edition)
Hello everyone,
My name is Rusty and I'm from Blue Robotics. We first posted our thrusters on DIYDrones back in 2014 - we've come a long way since then making lots of components to make marine robotics easier and more accessible. Most recently we've been working on ArduSub, based on ArduCopter, which has turned into a fully-featured autopilot system for subsea vehicles. The work done by the DIYDrones and ArduPilot communities is incredible and we are grateful for it.
Limited Edition Clear T200 Thruster (left) and the standard T200 Thruster (right).
Today we're back on Kickstarter with a fun project for Kickstarter's "Make/100" Initiative: A completely clear version of our T200 Thruster! It will make your next (or first) underwater project unique and is a cool learning tool as well. The campaign is limited to just 100 backers.
BlueROV2 with T200 Thrusters in Spain. (Nido Robotics)
Along with the campaign, we're donating 50 thrusters to the MATE Center to be given to middle-school and high-school robotics teams in need of funding.
The campaign ends January 31st and we hope you'll consider backing us!
Thanks,
Rusty and the Blue Robotics Team
Kickstarter: https://www.kickstarter.com/projects/847478159/the-t200-thruster-make-100-limited-edition
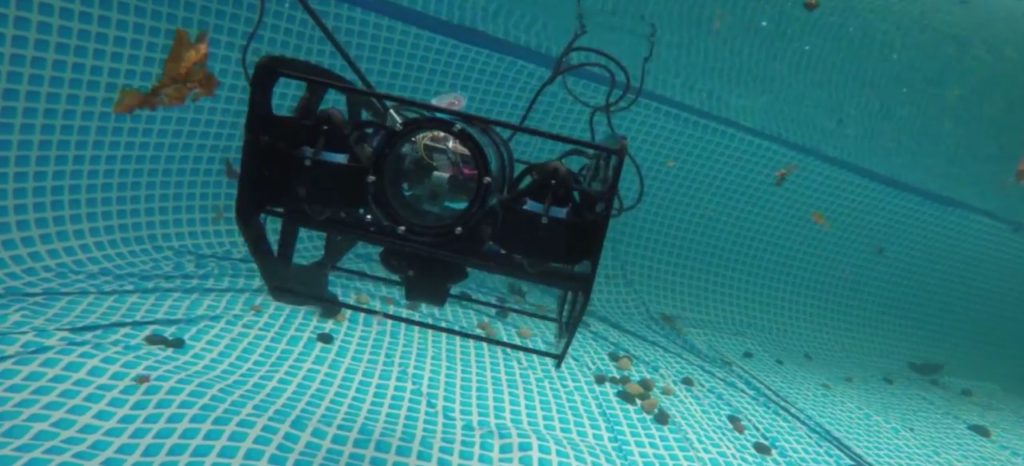
We're really excited to announce a new ArduSub/Pixhawk controlled underwater underwater vehicle, the BlueROV2. The 6-thruster vectored configuration, coupled with strong static stability, provides a vehicle that is smooth and stable, yet highly maneuverable. The BlueROV2 provides the capabilities of a high-end mini-ROV at the price of the most basic commercial ROVs. It can reach depths of 100m and is highly expandable for new sensors, payloads, and capabilities.
We've spent the last six months working hard on ArduSub and contributing to QGroundControl to make the ArduPilot platform work well for subsea vehicles. It's come a long way in that time and we think it's got a bright future ahead.
The BlueROV2 comes as a partially-assembled kit (essentially ARF) and it can be completed in 4-8 hours. The setup is very straightforward and almost identical to ArduCopter!
The BlueROV2 is available for reservations with no money down today. Kits will begin shipping in August. Reserve yours today and please share if you know anyone who may be interested!
Reserve one now: BlueROV2 Product Page Link
Thanks for checking it out!
- Rusty @ Blue Robotics

Hello everyone! I want to share something that we’ve been working on for quite a while at Blue Robotics. If you follow the ArduBoat group or TCIII's ROV build thread, you may have already seen a bit about it.
This new project is called ArduSub.
ArduSub, we hope, will become the open-source future of subsea vehicles. It encompasses the software and hardware that makes up the brain of an ROV or AUV, providing everything needed to control the vehicle, communicate with the surface, and perform sophisticated subsea missions.
 Reef image captured by an ArduSub-powered ROV.
Reef image captured by an ArduSub-powered ROV.
ArduSub is based on the open-source ArduPilot project (ArduCopter, specifically) and takes it to a new frontier with subsea capabilities targeted towards ROVs and AUVs. ArduSub is already compatible with most DroneCode autopilots including the PixHawk.
Stability PID tuning during development of ArduSub.
What does that mean for future ArduSub users? It means that this project isn’t started from scratch – it’s born from years of previous development work, hundreds of contributors, thousands of hours of testing, and several generations of hardware. That provides us with a rapid path to maturity and already-built-in capabilities and features that surpass those of many commercial ROVs.
It also means options. ArduSub is compatible with ten or more different hardware autopilot options, multiple topside user interfaces on every operating system, a wide variety of sensors and actuators, and a host of tools such as DroneKit, mavros, and more.
All of this is thanks to the open-source community that has been working on ArduPilot for many years. Blue Robotics is committed to supporting the continued work of that community and to contribute back to it. We have proudly joined the DroneCode Foundation, which manages the ArduPilot codebase, and hope to support this great organization for many years.
![]()
Where are we at right now? ArduSub is currently capable of controlling several different ROV frame styles and has support for gamepad/joystick use through QGroundControl, depth/heading hold, lights, and video streaming to QGC. We've done lots of testing including ROV dives down to 135 meter depth.
What’s next? With the help of several contributors and a number of beta testers, we are making steady progress towards the first official release of ArduSub. We're working on lots of improvements to make it easier to set up and easier to use. ArduSub is still under heavy development and there are new changes happening often. Please follow along and let us know if you’d like to join in.
More info:
Also:
Hello all,
First of all, we wanted to remind everyone that the BlueRobotics T100 Thruster Kickstarter is live starting at 8:30am Pacific time today! The T100 is the first underwater thruster that is affordable for hobbyist projects. We've put tons of work into it and we hope that you will consider backing us! There are many ways it can be used on drone/APM/Pixhawk projects. Check out the ArduBoat User Group for ideas.
You can back the Kickstarter here.
Speaking of APM-based marine robotics projects, we've made some significant progress on our SolarSurfer vehicle. The SolarSurfer is a T100 propelled autonomous robot that is powered by a solar panel and navigated by an APM2.6. We are working towards a non-stop trip from Los Angeles to Hawaii.
Last week we completed a 24 hour test in the open ocean. The SolarSurfer was launched from a boat off the coast of Los Angeles and autonomously navigated under solar power until the sun went down. At night, the robot drifts with the current. The electronics and satellite link stay active so that we can track it's movement.
The following morning it "woke-up" and continued on its way. We intercepted it with the boat in the middle of the day. Successful test.
Here's an image from the test. We'll have a map of the GPS track posted on our website in the next few days.
Thanks and remember to check out the Kickstarter campaign!
- Rusty, Joe, and Josh from BlueRobotics
Hello everyone,
My name is Rusty and I am from BlueRobotics. We've spent the last nine months developing an underwater thruster for marine robotics that is high-performing, resistant to saltwater, and affordable for hobbyists. We've used it to propel a few vehicles with the APM2.6 already.
SolarSurfer ASV. End goal: send it autonomously from LA to Hawaii, guided by an APM2.6.
http://hackaday.io/project/1677-SolarSurfer
http://www.bluerobotics.com/solarsurfer-ocean-test-2/
https://github.com/bluerobotics/SolarSurferCore
ROV: Six thrusters for six-degree of freedom control. Multicopter-like feedback lets it auto-stabilize and hold any orientation. It uses an APM2.6 for control and a Raspberry Pi to stream live video over an Ethernet tether.
Today we're announcing our Kickstarter campaign! You can preview the campaign here and let us know what you think.
The Kickstarter Campaign will go live on August 12th, 2014 at 8:30am Pacific.
We've been longtime readers of DIYDrones and we've built multicopters, airplanes, and lots of other robotic vehicles. We hope that the DIY robotics revolution can extend into the ocean!
I hope you will check it out and back us next week! Please let us know if you have any comments, questions, or suggestions. You can do so here, on the feedback form at the top of the preview page, or email us at info@bluerobotics.com.
You can also visit us at www.bluerobotics.com and join the new Arduboat User Group on DIYD.
Thanks!
- Rusty, Joe, and Josh from BlueRobotics