Posted by Saulius L. on October 7, 2022 at 12:20am
A quick demonstration of how guided zoom works (distance the the TV tower - 1.3km). Calibration is not perfect (and should be automated). The focus stays sharp during the zoom transition.
Posted by Saulius L. on January 24, 2022 at 6:13am
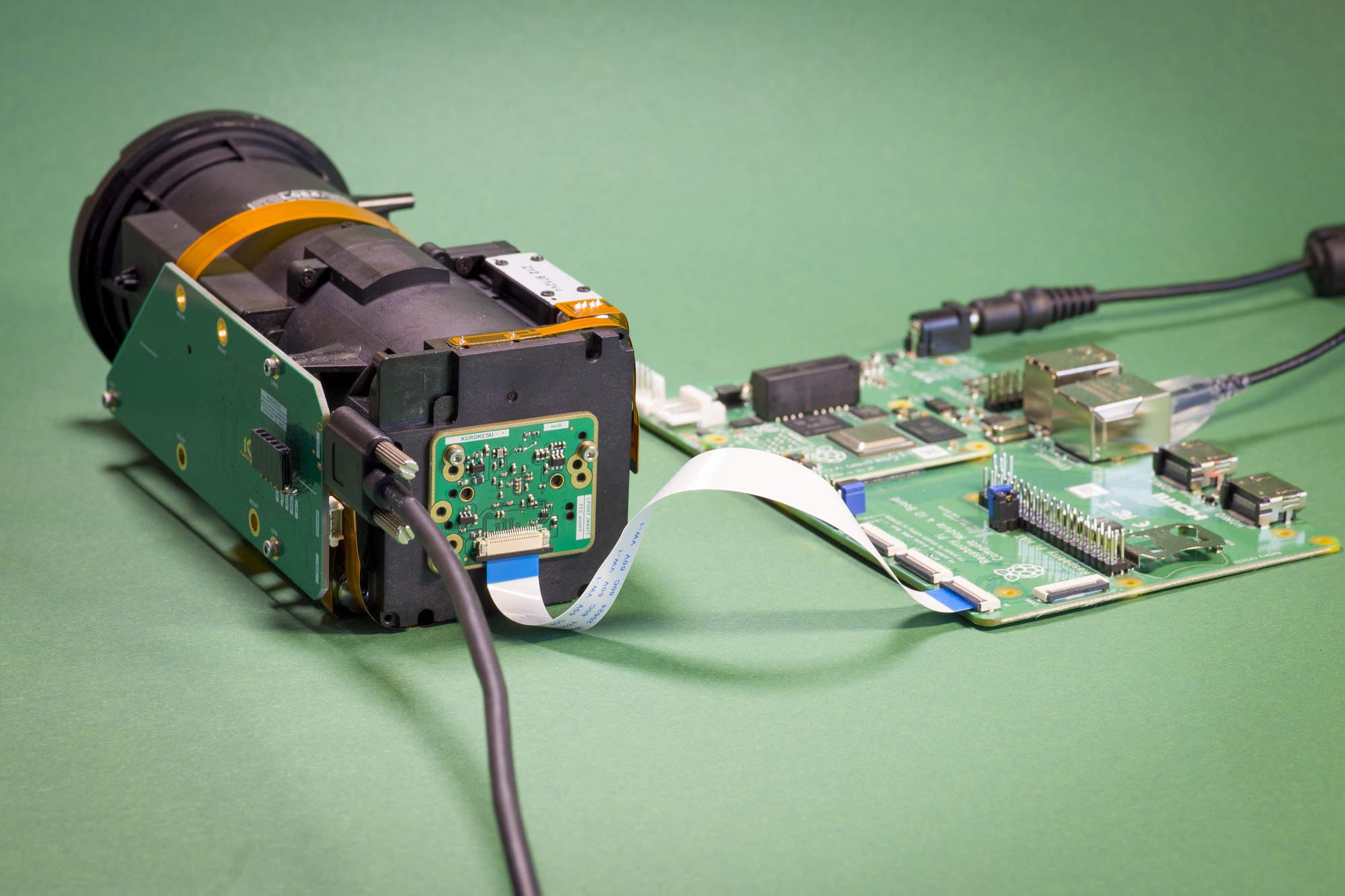
With the introduction of motorized zoom lenses, the next logical step was matching the sensor board. Sure there are countless suitable sensors from various manufacturers like Sony semiconductors, Onsemi, Aptina, and many more. But lack of good support from the SOC side suggested starting from IMX477. It is a reasonably modern 12M image sensor used by many single-board computers like Raspberry Pi, NVIDIA Jetson, and others.
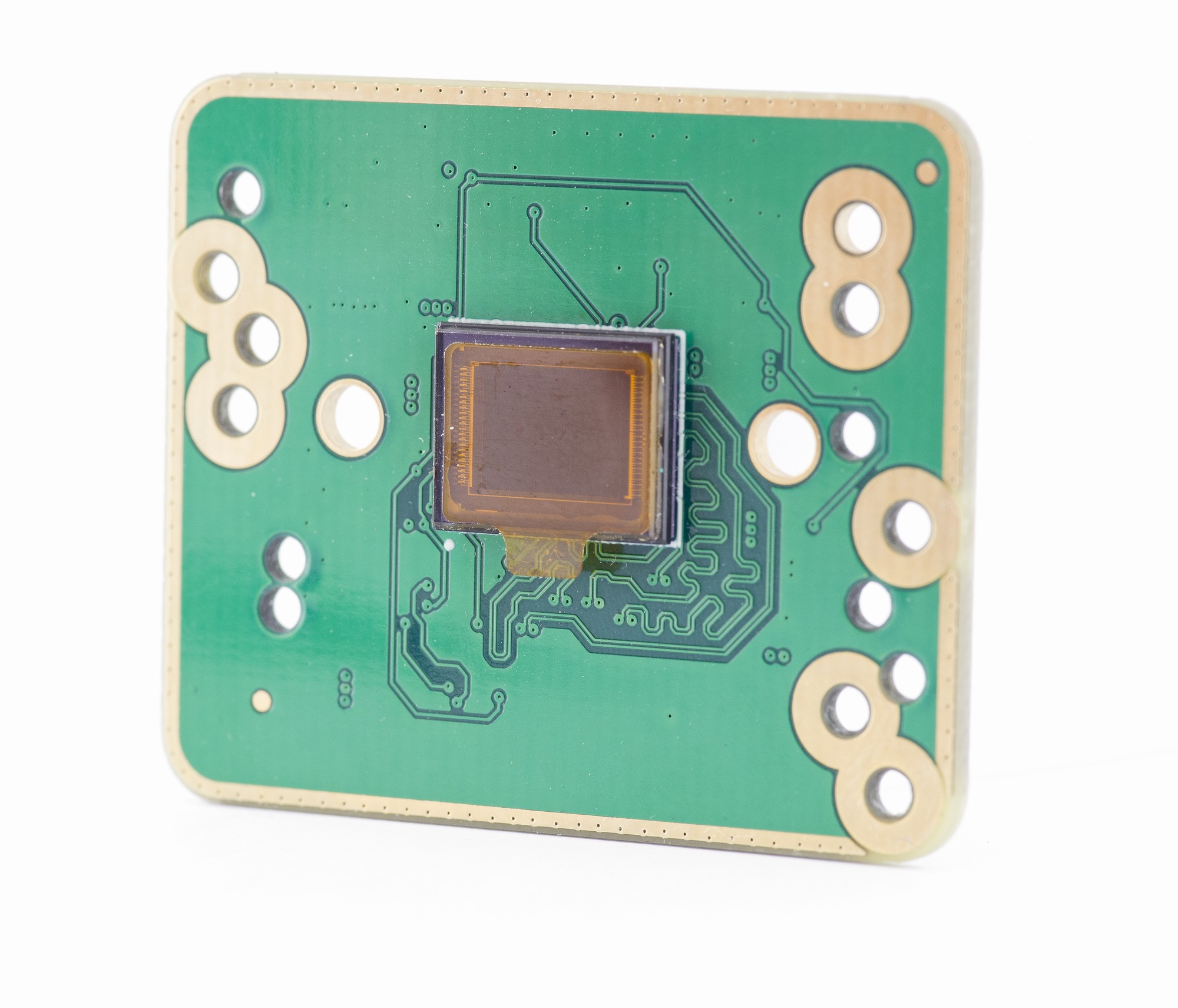
Raspberry Pi locks cameras with a security chip and prohibits non-authorized cameras with standard boards. Luckily this security feature is not used by compute modules. Motorized lenses have dedicated, and in most cases, unique direct mount features. So a custom camera module is a must, thus introducing the IMX477 MIPI CSI2 camera board.
This is the first of a few upcoming camera modules. Note multiple mounting features – this allows single-board use with many lenses.
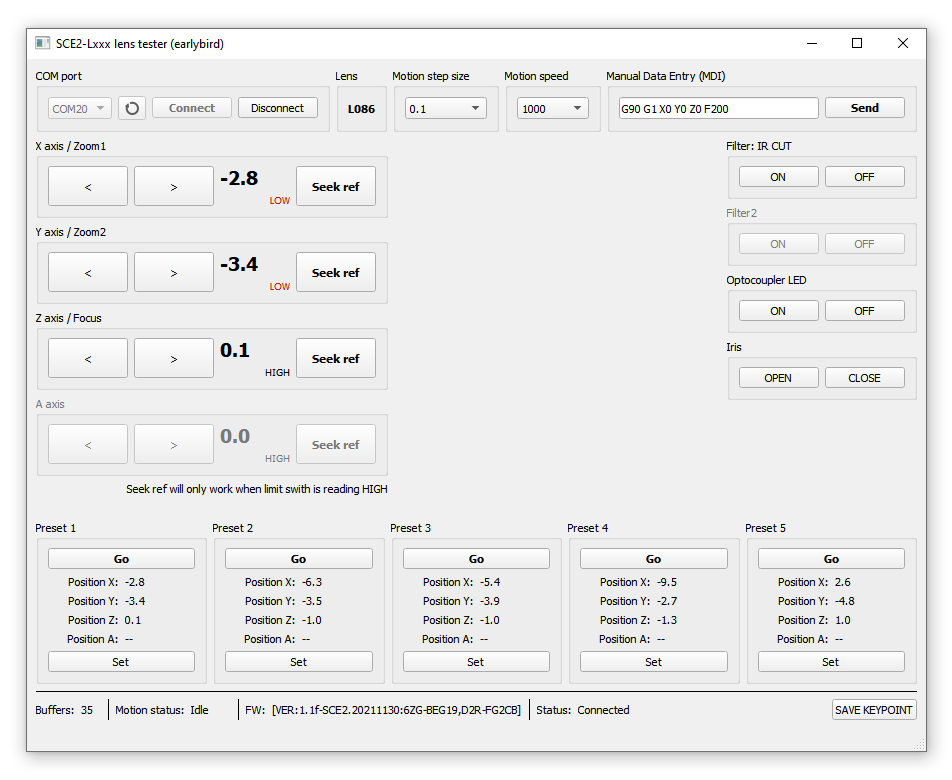
Features of the lens kit:
Lens optical train – 3 stepper motors for Zoom, Focus and compensate lens groups
Iris
Two optical filters: IR CUT and NIR
Reference optical train elements
Runs on GRBL firmware ported on STM32 CPU with four axis motion planner
Using the camera with Raspberry Pi compute module
There is a great resource about the IMX477 camera on Raspberry Pi pages, feel free to learn how to control and use it from Raspberry Pi. Below is a simple recipe for streaming real-time video from RPI to a computer.
The SCE2-SDK control software can be forked from GitHub. Python code allows code reuse on many operating systems and keeps it human-readable, thus open for customizations.
Posted by Saulius L. on August 10, 2020 at 10:09pm
Some time ago released smallest motorized lens controller suitable to drive advanced lenses. Is drives opto mechanical lens which in combination with USB camera makes lightweight camera Kurokesu C1 PRO X18 with optical zoom of 5.5~95mm. Posibility to change h.264 on board codec parameters makes it suitable for low bandwidth applications.
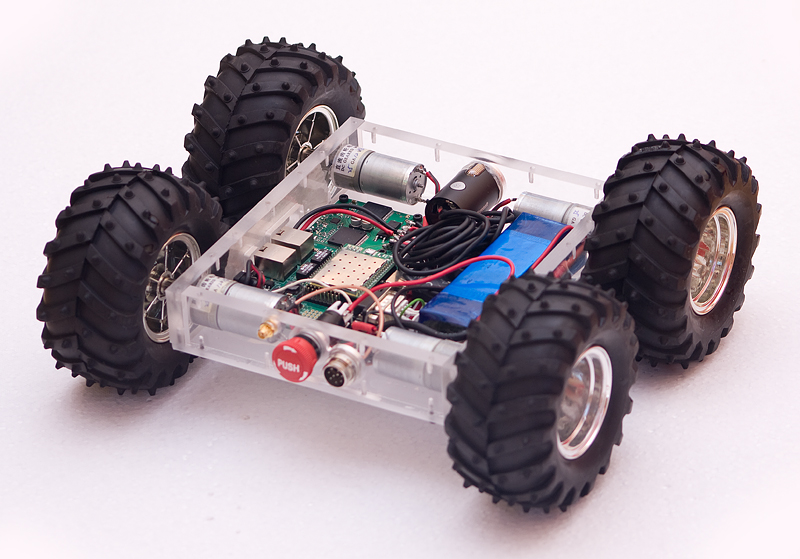
Almost any sensor yields more interesting results if mounted on a moving platform. It’s time to mount TOF LIDAR on two precision rotary stages arranged for pan and tilt operation. Rig provides real-time position data along with distance to an obstacle. Using simple math we can calculate position in Cartesian coordinate system. Data is collected point by point to reconstruct 3D object model. After 3D reconstruction and colorizing in MeshLab I got amazing result of my room.
This blog record is about using Carambola with Arducotper to get live telemetry data from quadcopter.
Carambola is low cost, open-source WiFi (21.5 dB / 2.4GHz) embeddable platform from 8devices. I have decided to use this board to control arducopter from computer. In order to have reliable link I have used two Carambolas. One as AP (on the quadcopter) other as Client (ground station). Mission planner connects to arducopter via bridge created by these boards.