
The 1st flights good enough to get on video. It's extremely unstable, but there is hope. The MPU9150 was the only way to get the sensors small enough. It might also be the smallest thing currently flown by a computer, anywhere in the world.


There was some chance noisy stick voltages were making it unstable, but the oscilloscope showed the noise was down near 20mV while flying deflection was near 500mV in the pitch & 100mV in the roll. The Y position has more error because the camera can't sense depth.
roll & pitch sticks while flying

roll & pitch sticks while flying
roll & pitch sticks while flying
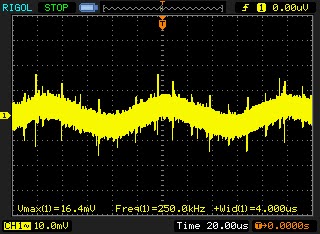
inactive stick noise

changing stick by 0.01


After a flimsy hot gluing of the board on top, the MPU9150 gave drastically improved results over having 1 board for a magnetometer under the battery & a 2nd board on top for a gyro. There's still a bit of error because the board isn't perfectly flat, but it manages to recover. The current or the flexing of having it under the battery was a problem.
There was 1 source file for the MPU9150 on http://permalink.gmane.org/gmane.linux.kernel.iio/4339, revealing undocumented register REG_YGOFFS_TC. He never uploaded the header files.
With the full Marcy 3 software & the crystal, the MPU9150 only reads at 80Hz.

A wishful crystal to get the PIC as fast as possible added some more size. If the PIC does nothing else, it can get 140 readings of all 9 sensors per second. Without the crystal, it can get 80 hz. 50Hz is probably enough for the application.
Being the low end PIC that it is, only software I2C was justified. If it was concerned with the full attitude stabilization, it would need hardware I2C for the gyro/accel part. The trend is now to use STM32F ARMs for even these nano quads.







Took some doing to override the stick voltages.
Comments
Thumbs up Jack! Once again you step up and leave them Guessing???? Have a great Day!
Mark
I think Jack uses his vision systems for positioning via a Raspberry Pi feeding back to the gyro, mag and controller on board.
again and again stunning things you deliver us with :)
Awesome work dude!
This is the future of the Hobby for sure. Micro Copters are awesome.
Also, what exactly is providing the flight control? Is it a computer which is controlling the Tx?
And is this a V1 (with accelerometer) or V2 (no accelerometer) ladybird?
Jack, this is really neat stuff. I'm excited that you're using the ladybird as the platform... it could give you quite a large user base. I know I'm certainly interested in following along your trail-blazing path.
How did you wire up the LEDs, btw, would you mind sharing that?
Brilliant as always. Jack, I don't know how you do it, but you're consistently a year ahead of everyone else. Keep it up!
How about 'Atalanta-pilot' instead?
Hey Jack I've been looking at the Lady Bug quad because I'm hoping to turn my Mini R/C Heli into a Micro UAV. I'm curious if you happen to have an estimate on how much all the autopilot hardware weighs? I'm trying to figure out if the mini heli can handle the extra weight.