
Hello all,
I just wanted to detail my small triumph this past weekend with this - my first blog. I have been building up to a 100 km flight for the past few weeks (months?) It's just something I've been wanting to do - and do it with budget friendly parts. Data analysis and design optimization are things I enjoy almost as much as flying. Aero design and controls are not my expertise though, so this has been a trying but enjoyable learning process. Thanks to the knowledgeable folks here, and other forums, I gleaned enough tips to go for my own 100 km attempt. Enough about me - on to the plane and flight!
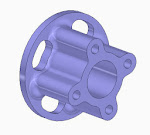
Airframe: Phantom FX-61 flying wing by Zeta Science
WS: 1550 mm (61")

I chose this airframe because I have some experience with wings (DIY foamies), they are generally durable, and I was just tired of fiddling with/fixing my Skywalkers. Failed launch attempts on my SWs (V6 and 2013) usually meant my day was done and time to get out the hot water and glue. The Phantom has survived several rough launches and hard landings with very little damage to show. The worse is to the canopy when it came loose during a cart wheel and was chewed up by the prop. I also had a motor mount fail on the day of the attempt. (more on that later) The Phantom does not appear to be the sleekest of wing designs. It has fat dual vertical stabs, upturned tips, and a lot of reflex in the airfoil. It does make for a slow and steady FPV platform, which is what it was designed for.
Mods:
Printed motor mount extension to move the light motor rearwards and help balance the batteries. This, along with shaving down the curious horn shaped fuselage end, also considerably reduced the noise of the prop.
No additional spars other than bracing the top and bottom with lots of fiber strapping tape.
The ailerons were cut free and tape hinges were applied. The hinge line was also sealed top and bottom with Blenderm.
Electronics:
Motor: Turnigy Multistar 4225-390Kv 16Pole Multi-Rotor Outrunner
Prop: APC 10 x 10
ESC: Hobbyking YEP 40A (2~6S) SBEC
Batteries: 6S 7200mAh (2 X 3S 5000 mAh 20C + 2 X 3S 2200 mAh 20C) lipos
Control: 9x with er9x, FrSky 2.4Ghz tx module, D8R-XP rx
FC: APM 2.5 (2.77 firmware)
Sensors & misc: NEO-6M GPS, Airspeed (disabled for flight - not by choice), 90A RCTimer-style power module (needed for 6S I believe), and 915 mhz 3DR telemetry
On the ground, I ran the latest version of MP with the 3DR ground radio zip tied to a fiberglass driveway marker rod on a 10ft usb cord - very simple and cheap.
I designed the power system based roughly on a discussion here on DIYD. (Wayne Garris' 170 min Techpod flight) It was some time ago, and when I went back to check, I realized it was Reto Buettner advising Moglos - who just joined the 100 km club as well! Well done Reto. You should start charging a fee, or perhaps deserve a "100 km master" badge.
I will include the testing/tuning flights leading up to this, but felt this blog entry was getting long. I'll add the preflights below.
The Flight
The winds were mild last Saturday so I decided to go for it. There was a window in the morning with the afternoon bringing more wind and rain. To make certain of the distance I decided to go to 7200 mAh of lipos. This took some foam removal and a few frustrating hours of getting wires to fit. I hesitate to cut the heavy gage wires and make a custom power harness, but that is really what should have been done.
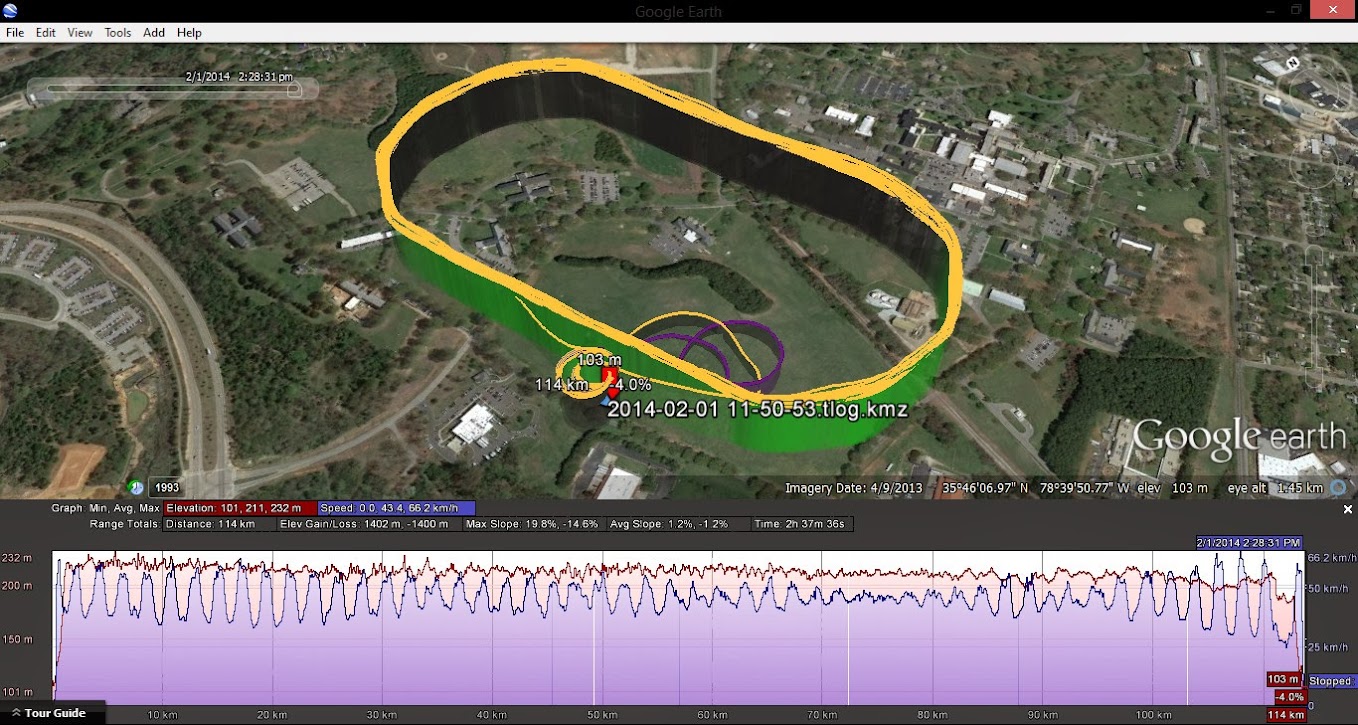
My first launch attempt at the heavy weight (relatively) ended in a premature belly landing and flip. Since I was still on the throttle trying to eek out the launch, the prop hit the ground and tore the motor and mount out. My AS sensor pitot was also ripped out. Desperate to fly with no end to crummy weather in the extended forcast, I performed field surgery with superglue and kicker. I also disabled the airspeed sensor. The second launch was not much better. This time I cut the throttle to avoid snapping the motor mounton the ground, but the plane skipped up like a rock! I hit the throttle and away she went. Everything appeared to be working properly so I started the WP pattern. Fast forward a couple of hours and here are the results!
Flight time: 2 hrs 37 mins
Total flying distance: 114 km
Battery consumed: 60% 68%
Ave current during Auto: 3.7 A 1.9A*
Ave power during Auto: 87 W 44 W*
Ave airspeed during Auto: 13 m/s
AUW: 2145 g
I am not sure how to attach the tlog. It is 15Mb.
*I have edited the originally reported current valves (and subsequent calculated power values) to the correct values. Thank you to frederic reblewski for catching the error.
It is strange to be able to photograph your own plane in flight.

Two of the guys flying FPV quads actually chased the plane around its circuit. I got to experience a chase plane view of my Phantom as it navigated to WPs through a spare set of goggles! One even advised me that my plane seems to be speeding up and slowing down throughout the flight - which was later confirmed in the tlog. This was an unexpected treat to have a full scale flight instructor giving feedback from a chase "plane" like a real prototype flight.

Due to the early launch issues, the tail end of my flight missed the target window and the last 20 km of the flight were in gustier winds and light rain. I still had plenty of juice left, but the conditions were worsening, so I brought her in. After a 114 km flight, I greased the landing within 10 ft but still broke the motor mount off. Resting voltage was still 3.75 V per cell.
All in all, it was a spectacular day in my book - one of the best days of flying in a long time even though I was on the sticks for about 3 total minutes!
Comments
I use a Do_Jump command in place of a waypoint. You will need a dummy waypoint after the Do_Jump.
I don't think I can attach pictures here, so I'm linking to G+.
https://lh3.googleusercontent.com/-6yjkR4i6c4o/UuUZk47PVyI/AAAAAAAA...
In this mission, there are 11 WPs and Home. I want to jump from WP11 to WP1 and repeat 50 times. I created WP 12 and 13 between WP11 and WP1. I then change WP12 to a Do_Jump command. The column headings then change to "WP #" and "Rep". I enter "1" to jump to WP1, and "50" for the number of cycles. At the end of 50 laps, it RTL'd.
(Note. If I did this over, I would probably just make 4 WPs and use my nav tuning to give big, lazy turns rather than create multiple WPs for a smooth racetrack.)
how did you autonomously fly that circuit continuously ?
congrats, very interesting build, def going to check into a high efficiency low KV power setup.
hi fellow dronians, have created a forum for phantom FX61 in APM Forum. lets move our discussion to this forum.
http://ardupilot.com/forum/viewtopic.php?f=96&t=6581
will create it today on apm forum
Ravi, did you create a post on the Ardupilot forum?
Thanks, Shah
Congrats on the achievement! It is pretty inspiring to see these setups getting such great endurance.
i have not yet flown my FX61 in auto mode. i did fly in FBWA and Loiter. In FBWA mode i was not able to pitch up the aircraft so I knew that APM is not giving sufficient elevator to pitch up. this was probably the PTCH2SRV_IMAX was set to 500 (should have been 1500). It was not holding altitude in Loiter and I think it was because of same reason. You are right in manual mode it does not uses Yaw stick but may be in the APM auto mode algorithm it takes Yaw in and passes them as controls to aileron. but i will keep YAW2SRV_IMAX as 1500 (default). In my Loiter flight the circle radius looked pretty closed to LOITER_RADIUS defined in Mission Planner. So my Yaw looks OK.
should we shift the discussion to APM Forum where other flying FX61-phantom can join us. http://ardupilot.com/forum/viewforum.php?f=25
Ravi, are yaw parameters used in any way on a two servo wing? I've been curious about this. Also, how is your throttle and alt control in a nav mode? My throttle control during this flight was very cyclic - as was alt. I would prefer a more dampened throttle response - perhaps with more pitch input for alt. Any thoughts?
@Trung, just to update the YAW2SRV_IMAX is also to be set to 1500. but in this case it was 1500 by default.
-
1
-
2
-
3
-
4
-
5
of 9 Next