If you live in London, it can be difficult to find a wide open space that's suitable for practising your drone-flying skills. The capital's eight Royal parksare an obvious choice, but now aspiring pilots will have to look elsewhere -- staff have recently posted notices that strictly prohibit the use of drones and model aircraft inside the grounds.
It's a sad day :(
I wonder how many numpties it took to bring this about or if they're just following the US and National Parks idea.
I wonder if it will become toxic and councils will start implementing the same idea.
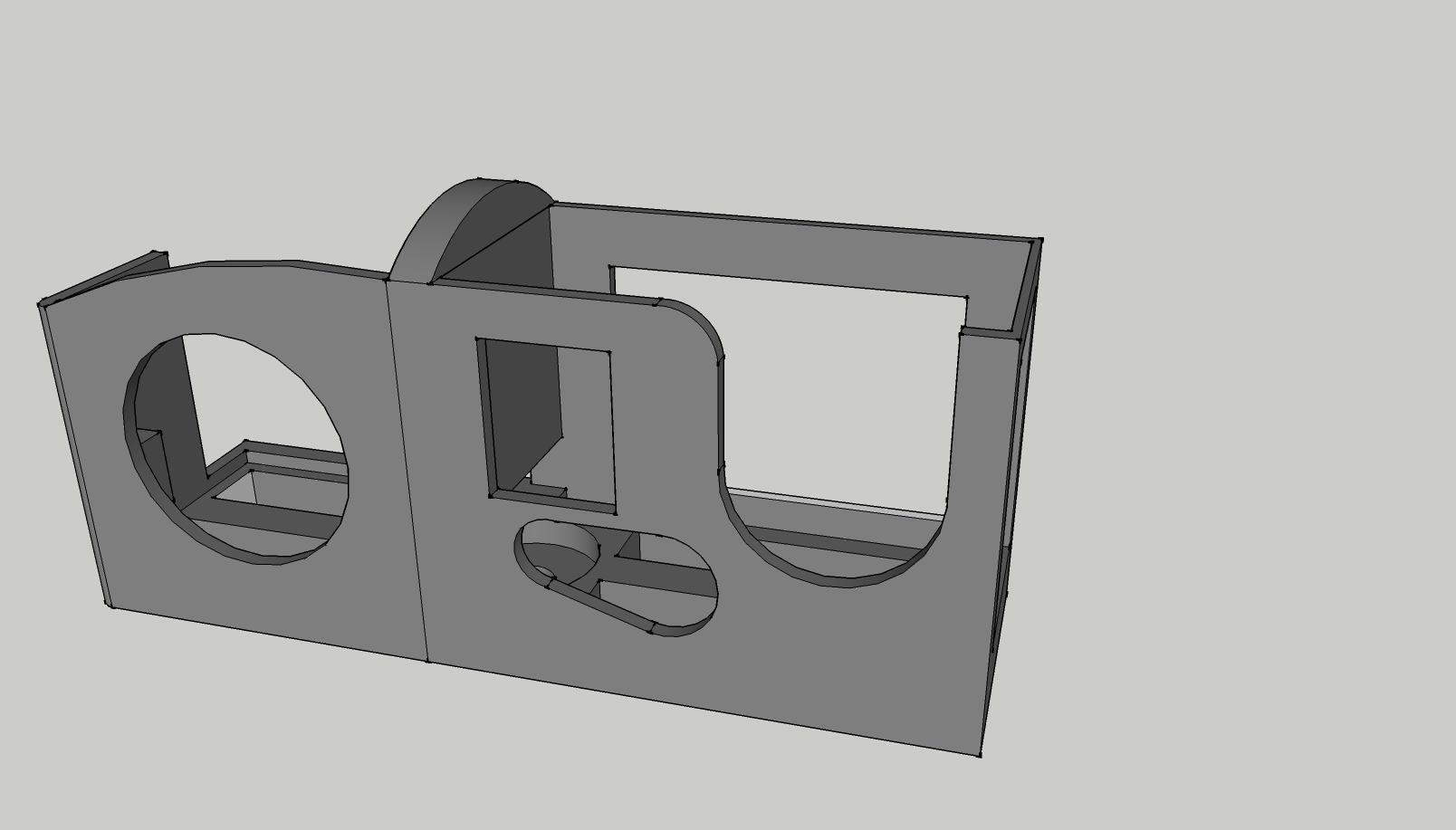
I've been doing a bunch of filming with my Tau2 (more to come on that) and recently I have needed to film with both the Tau2 and a GoPro with the aim of blending the video.
I set about designing a camera case which will house both the GoPro as well as the Tau2 at the same time. My goals were that it needed to be light, rigid and securely hold them.
The 3rd draft of it has worked quite well i think.
Some enhancements (printing at the moment!) will be:
Thicker side walls
A clip over the top to hole them in place (although the fit is so snug only a crash would dislodge them)
Honestly, there is not much more I can want with it. It does what it needs to.
I'll post an update here and on my other blog in a few days once I have printed it and given it a few test flights.
I've been struggling to understand how to get the APM failsafe working properly and have yet to find some clear instructions that a noob like I can follow. It suddenly dawned on me how to get it all setup.
Here is my normal zero throttle output:
Here it is when the radio is off:
The AR8000 can be taught what to do if it looses contact with the mothership. The default is to leave or move the throttle to zero. As you can see, zero is normal and not enough to invoke the APM failsafe. (see here for more info on the APM Failsafe: http://code.google.com/p/arducopter/wiki/AC2_Failsafe)
What you need to do is tell the AR8000 to go below zero when the radio is lost and here's how you do it:
Turn on the radio and go into servo setup.
Find the throttle travel setup (on the DX8 it's the first screen)
Scroll down to negative travel (Left hand 100%). Change that to as high as it'll go. 140% in my case.
Confirm in Mission Planner that throttle input is now around 920uS
Turn off radio and receiver.
Insert Bind plug into RX and turn on.
Remove bind plug from rx. Light should continue blinking.
Ensure throttle stick is down.
Turn on radio while holding down bind button. Radio should rebind.
Turn everything off.
Turn radio back on and change the throttle throw back to 100%
Turn on quad and connection with MP
Confirm that minimum throttle is back to around 1100.
Turn off radio and throttle should now drop to around 920uS (or whatever it was beforehand)
If not, start again.
Now go to parameters in MP
Find THR_FAILSAFE and set it to 1.
Find THR_FS_ACTION and set it to 2 (1 = continue on Auto mission, 2 is RTL)
Click on the write params.
Click on Refresh to ensure it wrote it.
What you have done is told the receiver that when you loose contact, this is the new throttle position. It is of course, way lower than normal range. The low value is enough to trigger the APM failsafe which will RTL and land.
This all works in theory for me and MP seems to agree, I'll be out testing it tomorrow but just wanted to get it all down on paper so to speak.
Not being overly chuffed with the battery mount on the 3DR and wanting somewhere to mount a camera, I decided to make another layer to the quad. A third plate below the quad seemed idea.
I fished out a scrap of unused fibreglass PCB I had in my goodie box. I took the quad apart to get at the bottom plate to copy as a template.
The normal plates have a series of 3 holes in the middle of each edge which seemed a perfect option to mount stuff. I drilled the same hole patter in the new plate.
Using M3 * 30mm screws built up my new platform. it is suspended under the quad and allows for a snug fit ot my 2200mAh 3S lipo. It simply slides in and is held there by itself. I might look at putting a strap in for safety to stop it sliding out.
The underside of the board is the copper clad which I was going to etch off but decided against it. It would make a perfect solution to adding more stuff like a camera gimbal because you can solder it :D
I did not take any pics during the build but it was pretty straight forward. The copper clad board is very easy to work with and rather strong.
The only think I am concerned about and will be changing is the screw length. I think the battery is a very tight fit and apparently lipos expand as they (dis?)charge so this might be an issue. 35mm will be ample.
I added very bright LED headlights to the quad a while back a) to freak the locals out at night and b) to help with orientation when the quad is far away. These are 12V LEDs and run straight of the 3S lipo. All was well....
One thing I don't like much is the rather small and dim SMD LED to tell me when the motors are armed. Mostly because it is small and dim but I also want to paint my CD spindle housing black.
So, why not make the LEDs turn on and off when the motors are armed and disarmed? Simple. We have a relay which can be controlled and I speak code (well, sort off).
A delve into the current 2.3 source code and I think motors.pde would be the best place to do this.
A simple relay.on() and a relay.off do the trick.
Now, I run the power from the LEDs from the battery, via the relay and the to the LEDs. Lights on. Lights off. :)
Hopefully this will help someone else do something like this.
if(motor_armed == false){
// arm the motors and configure for flight init_arm_motors(); //turn the headlights on relay.on();
}
...snip...
if(motor_armed == true){
// arm the motors and configure for flight init_disarm_motors(); //turn the headlights off relay.off();
}
p.s.
If there is a better place to put the command, I'm all ears. I've not studied the whole code