In this video, I am using a UMI, a sonar for altitude, and a wii-remote camera. The wii-remote camera is a very small camera that is included in the wii-remote.
The wii-remote camera gives directly the 2D coordinates of the IR spots in the image. It's interface is I2C. This is really a great sensor!
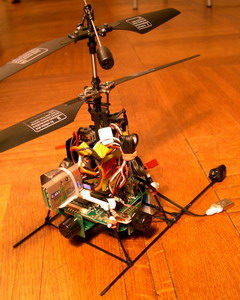
On my UAV, the wii-remote camera looks under.
I put IR LEDs on the floor.
I have put some lenses on this wii-remote camera, because the field of view was too narrow.
I still plan to make my drone navigate autonomously in an indoor environment, with several IR spots put on the floor.
For french-speeking people, you can see all the work that I have done on this web-site.
I made my first autonomous flight today. I am very happy to achieve this result!
It is only a 30 seconds flight, but 100% autonomous! Lift and landing are still under manual control.
It is not perfect, the control goes wrong after 30 or 40 seconds. I have to work a lot to obtain better results, but this first flight is a big improvement in my project!
Reminder :
BOB4 estimates its position with only its onboard sensors : 4 sonars, one 3D magnetometer, one 6DOF IMU.
The computing is only onboard, without any external aid.
All computation is done on an “Embedded Master” motherboard with .Net Micro Framework.
I have designed this UAV alone. The hardware and the software is 100% home made.
I am currently working on 3D position and attitude etimation of my indoor drone. I use a 6 Dof IMU, a 3D magnetometer, and 4 sonars (Devantech).
The position estimation is not yet accurate (still bugs), but I am working to improve it. I also have lot of problems with the magnetometer. All the computation are done on the drone. I just use Matlab for visualization.
The drone is still manually piloted.
My intention is to make my drone navigate autonomously in a simple indoor environment.