When acquiring a mapping or surveying drone, the choice is quickly narrowed to a fixed-wing airplane combined with Vertical Takeoff and Landing (VTOL) for its vastly greater range, versatility and ease of use. Within this segment, there are several commercial-grade solutions of European origin. But comparing their capabilities and limitations can be difficult.
The following comparison was made to provide a detailed insight into the characteristics of the leading suppliers in this field. The data has been verified across multiple sources. Several aspects have been calculated to provide a consistent representation of the data. The calculation methods and sources are provided at the bottom of this article.
The platforms chosen for this comparison are:
- The DeltaQuad Pro #MAP by Vertical Technologies
- The WingtraOne by Wingtra
- The Trinity F90+ by Quantum Systems
- The Marlyn by AtmosUAV
- The eBee X by SenseFly
In this article, you will find an abstract of the comparison.
Click here to read the full comparison
Key Features
A quick rundown of the most critical aspects that are relevant to mapping.

- Max flight time is calculated at sea level with camera payload.
- The coverage is calculated by multiplying the maximum flight distance by the maximum camera resolution. It is based on 3CM per pixel with an overlap of 50%.
- To compare pricing a package was selected for each model that most closely resembles: 42MP camera, <1CM PPK, 2 Batteries, Standard radio, GCS (if available).
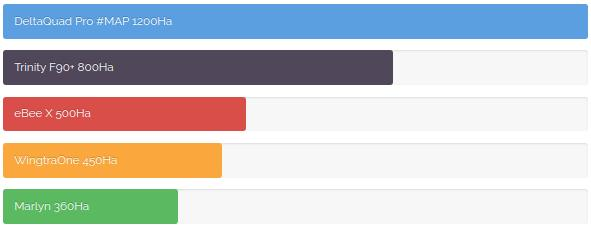
Maximum surveying area in Hectares
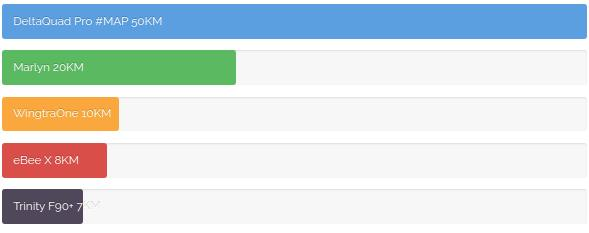
Maximum telemetry range
The maximum range at which the UAV can be controlled. Long-range communications is important for corridor-type surveys such as power lines, pipelines, railways, and roads.
The indicated ranges are the maximum radio range as specified by the supplier. Nominal ranges can be lower.
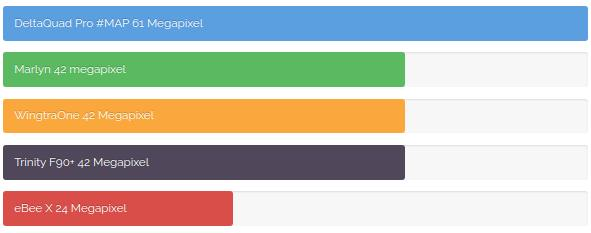
Maximum image resolution
The maximum image resolution in Megapixels is the total number of pixels that make up a single image. This can be an important factor for a fixed-wing/VTOL UAV.
A higher resolution allows:
- Covering larger areas
- Flying at higher altitudes
- Producing higher resolution end results
- Better post-processing performance with more accuracy
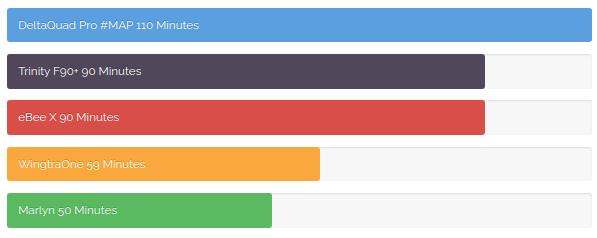
Maximum flight time
The maximum flight time for fixed-wing UAV depends on the altitude above sea level. As the altitude increases, the UAVs need to fly faster due to a lower air density. However, the lower air density also provides less drag, therefore in most cases, the maximum flight distance remains the same at all altitudes.
The indicated maximum flight times are at sea level while carrying a regular camera payload.
Read the full comparison
The full comparison contains detailed technical specifications, pricing details, sources, and methods of calculation.
Click here to read the full comparison