I have been following DIYDrones for years now, and have gleaned lots from other people's efforts along the way. I recently decided (after finding some cost effective frames on ebay) to get started for myself.
I started the heli hobby 2 years ago with a trex-450 in which i learnt pretty quickly, start small... much smaller than a 450 class heli! Constantly breaking various parts of the 450 was too expensive, so i gave up for a while. After some more reading online, and deciding I needed to push on, I purchased myself a Blade mSR to learn how to fly. It was nice, I got to use my DX8 transmitter during the learning process, its a bulletproof little fixed pitch heli which taught me how to compensate, and eventually I got very used to the flying process.
I purchased another spektrum receiver, and an initial cheap hexa kit (from GoodLuckBuy) which had frame/motors/esc's and a kk board. When it arrived it was missing parts (which they did quickly send me), but coming from china it took a while to get it all. I had also ordered an APM2 board at this point, but due to the popularity it took a while for it to get out to me, during that time APM2.5 came out, so I opted for the upgrade.
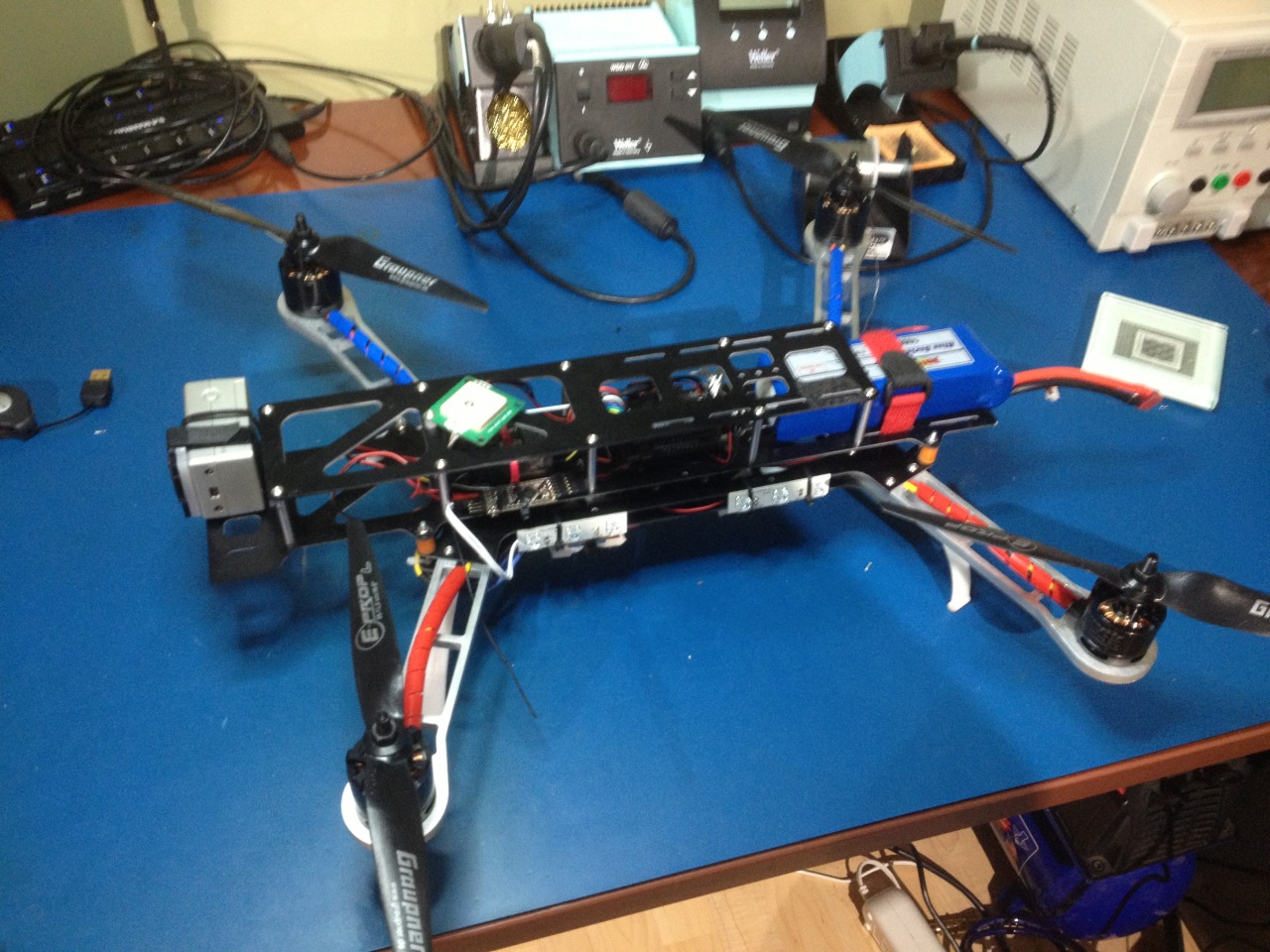
With the flimsiness of the initial hexa frame, I decided to get something a little more substantial. I went with the ATG 700-AL frame (which was cheapest at GLB, maybe I should have known better)... It arrived, missing 1 piece... Not a big deal, it was just the top plate of one of the motor mount assemblies. (I have ordered the missing part, and some extras from omgfly.com).
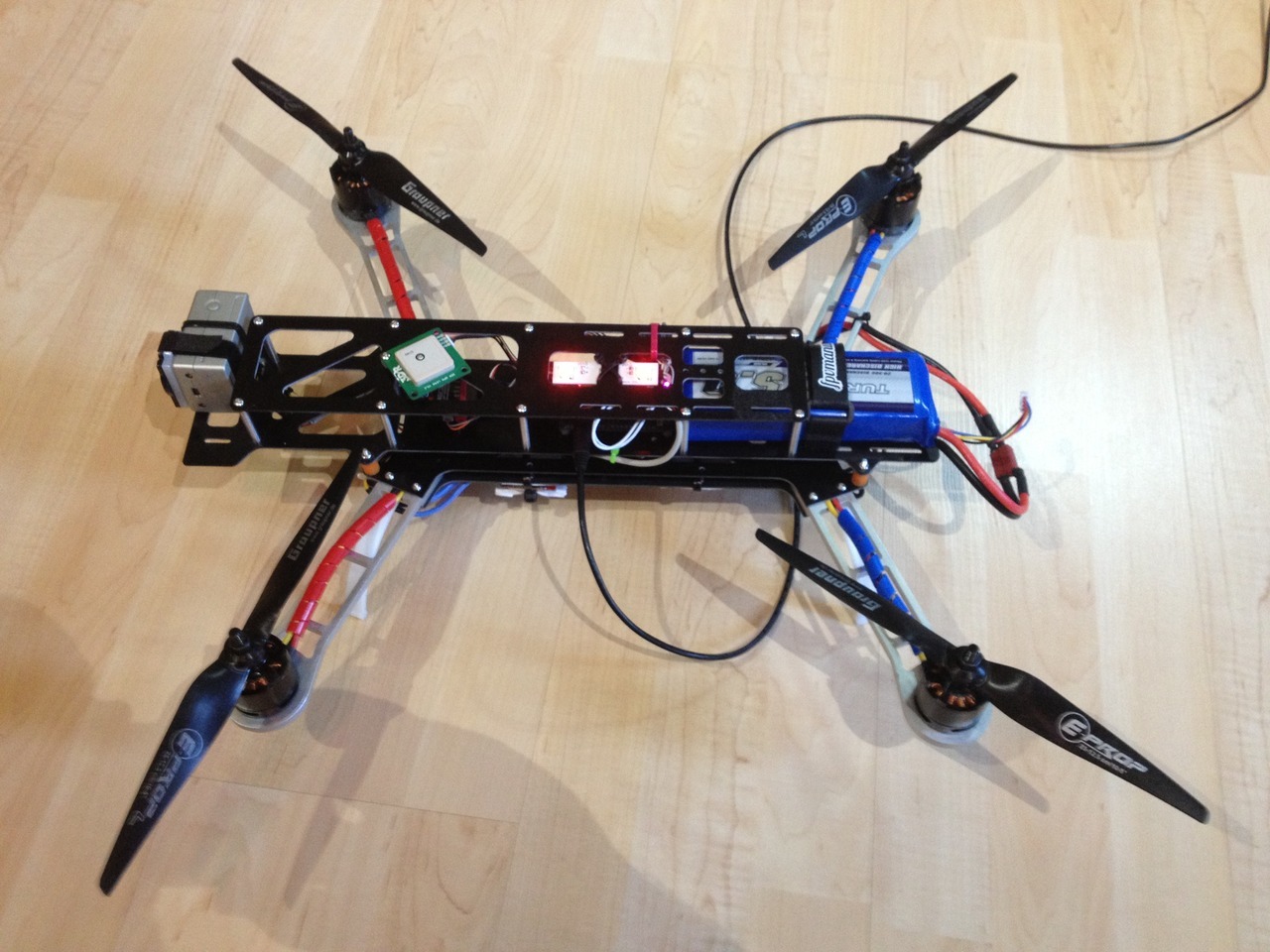
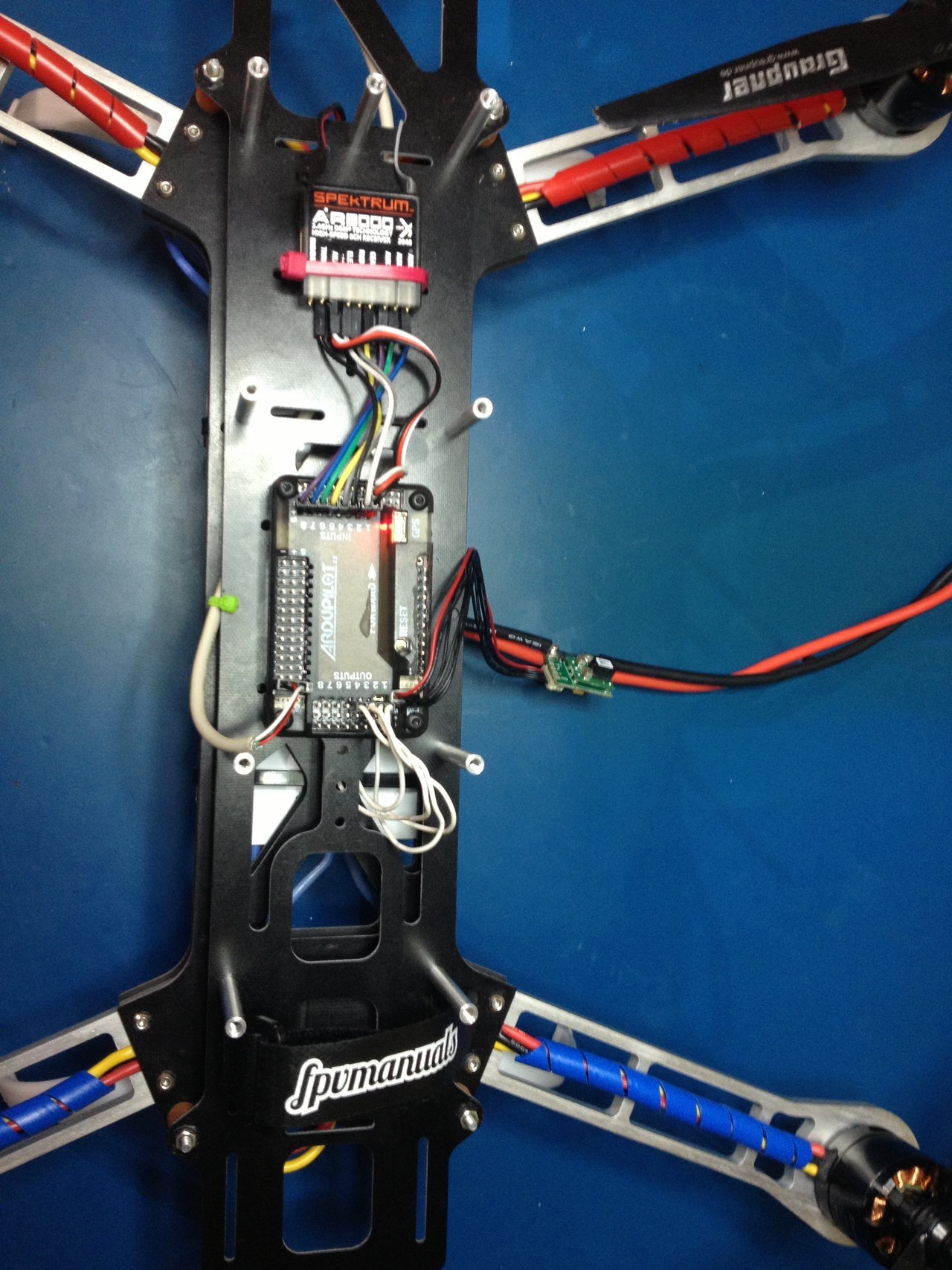
Over the course of the last 2 weeks I have assembled the new hexa with the APM2.5 board, GPS, Sonar and OSD. Power distribution is done via the Hexacopter power distribution board (available via the store here), with the deans connectors on whips, instead of directly to the board. This let me deal with the size of the frame, and short ESC power leads. I have a 2 Y setup from battery to the distribution. Y setup for 2 batteries feeds a Y setup breaking off power to the attopilot voltage+current sensor, which then feeds the distribution board and a separate UBEC to power the video gear (camera+transmitter).
I have had a few test flights and with defaults it is VERY stable... Loiter works perfectly with no wind, when its a little windy it seems to drift and have weird altitude drops.
I have some photos of the assembled hexa on my gallery here: http://g.chote.me/Multirotor/Hexacopter
I will continue to update with my progress, and get some videos together also.