A refreshing piece on positive uses for UAVs on CNN. Mentionas DIY Drones. And positive responses in the comments sections, oh yeah!
Link to full article and video: Videos from Drones
A refreshing piece on positive uses for UAVs on CNN. Mentionas DIY Drones. And positive responses in the comments sections, oh yeah!
Link to full article and video: Videos from Drones
I've been several months under the radar, being pretty elusive. My apologies to all who are or have been hoping for more information. I noticed this morning that there have been a consistent number of views of my goofy Introduction video (See here: Introduction to the Orange Hawk ), and so, here is an update of the progress on the project:
I presented the Orange Hawk at the AIAA Region VI Student Conference, held in Salt Lake City, March 28-30, 2013. I won 1st Place in the undergraduate division, and was spoken of highly by the attending AIAA special guest, Dr. Sandra Magnus. As I've won the regional conference, I will be one of a dozen or so finalists to present in the AIAA SciTech 2014 conference being held in Maryland this January, less than 25 days from this writing. ("Dozen" as in a handful of other undergraduates presenting in the student competition, the SciTech Conference proper will be huge with hundreds of presenters.)
I've probably placed about 2 hours of flight on the Orange Hawk prototype since the conference, of which about 20 minutes has been sustained forward flight. The majority of that flight time was accumulated in May and late August and the first week of September. I took an internship with Raytheon in Tucson AZ for June to August, and only flew the Orange Hawk twice during that time, due to the lack of accessible fields (it is nothing but cactus there) and little time. One flight is documented in this Vimeo upload:
2013-07-20 18.03.36 from Stephen Carlson on Vimeo.
On September 12, during the furthest and longest forward flight test thus far, I flew out of range of the 72 MHz R/C link that I had been using on the vehicle. I was flying "heads down" using the vehicle's FPV video telemetry, and dealing with severe interference on both the video link and my old 72 MHz receiver. At about 500 feet, the control link spazzed out and the vehicle dove into the thick alfalfa that comprises my main test flight area. There was little damage, but as a full time student in electrical engineering this semester, I've had little time to repair and fly the vehicle. I've decided to retire the offending 72 MHz R/C receiver, and have purchased a DragonLink V1 setup for all further test flights.
The most common questions I've had, both in public and private messages, have been requests for the code for some other multicopter flight controller. One of my regrets from this summer is that I was offered a position by a fellow to work out porting the project to the APM or PixHawk architecture. Worried about money for school, I took Raytheon instead. :( It is still possible to port this to other platforms, and in it's full implementation, would see the Orange Hawk and other VTOLs flying around in fully autonomous forward flight. I would like to pursue this goal, and would like to see it realized at the SparkFun Autonomous Vehicle Competition to be held in Boulder CO in June 2014. Otherwise, my hands are full in just trying to keep the code up-to-date with the most recent version of the MultiWii. In the RcGroups VTOL forum, there have been posts about a VTOL software suite for the OpenPilot architecture; I've not kept up on the specifics. Here on DIYD, there have also been efforts/suggestions to build a cross between the ArduPilot and ArduCopter code bases, again, I'm somewhat ignorant on specifics, but would like to contribute.
Another question I get is "Why 'Orange Hawk' ?". The predecessor to this project was the tail-pusher I constructed in August 2011 (shown here: White Hawk Flight Video ), which I christened the "White Hawk". Googling for obscure hawks, I found that there are/were hardly any entries for "Orange Hawk", and as orange is my favorite color, that is what I chose. At present, searching for "Orange Hawk" almost always yields a link/reference to this VTOL design.
Beyond the Orange Hawk and school, there is actually a lot more I've been working on. During May, I constructed my own Long Range System based on the RFM22 and RFM23 RF transceivers and the atMega 328p. It is my own design, motivated by my interest in making a system that functions as both a LRS and an emergency locator beacon. The system has a single cell LiPo charger built into the receiver, and is capable of intermittent transmission for several weeks even if disconnected from the aircraft power supply. I was inspired by FMkit's emergency locator modules that are also RFM22-based, and use an audio tone location scheme. I'd like to improve on that by making the locator capable of audio and data, such as transmitting the most recent good GPS value along with time-stamp. The prototype boards are finished and have been tested with a simple audio tone generator, but I have not had the time to code the firmware for the actual R/C system functionality.
My blog at RcGroups still has the links to the design plan PDFs and MultiWii source code that I use on the Orange Hawk. The main landing page for that blog is here: KatanaGuy RcGroups Blog . I hope sharing my work here will promote interest in VTOLs and demonstrate the utility and value of such designs. Thanks for reading, and let me know what you think.
-Steve
Introduction to the Orange Hawk Project from Stephen Carlson on Vimeo.
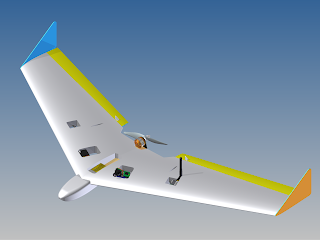
Presented here is a VTOL aircraft design that I've perfected over 16 months, and intend to release as an Open Source project with design plans and code. Initial details:
Wing Span: 1000mm
Area: 21.5+2.6 dm^2 (Elevons)
Quarter-Chord Sweep: 30.0deg
Airfoil: MH45 with Root: +2.0deg Tip: -0.5deg
Material: 21.0kg/m^3 EPP
Equiv. Rotor Diameter: 500mm
Flight Controller Based on MultiWii 2.1
All-Up Weight: 1.2 kg, Theoretical Maximum: 1.5 kg
Designed Fall 2012
From Wired:

For a day, a sandy-haired Virginian named Jeremy Novara was the hero of the nascent domestic drone industry.
Novara went to the microphone at a ballroom in a Ritz-Carlton outside Washington, D.C. on Wednesday and did something many in his business want to do: tenaciously challenge the drone regulators at the Federal Aviation Administration to loosen restrictions on unmanned planes over the United States.
....
Full Story:
I just noticed on Popular Science that Discovery Channel is putting out a new documentary called "Winged Planet". Looking at the previews, I was delighted to see that they have built a FPV Vulture with HiDef cameras, and they also used a multicopter for other shots.
Detailed here: http://dsc.discovery.com/tv-shows/winged-planet/videos/making-of-winged-planet.htm
Airing tomorrow October 6th at 20:00 East / 19:00 Central
As I was going over my portfolio tonight, I noticed this presentation which I gave for my Technical Writing class at BYU. I figured I should post it here for any insights it may bring for others. Presentation attached below as a pdf.....
Catagory: Fixed Wing- 125cm Flying Wing
Total Time: 1:40.
This is the 3rd or 4th time I've flown my wing with the APM. (And my first experience flying with the APM.) Tuning is still in progress, but I've been very impressed with the system thus far. The stock PID gains have worked pretty well. For the run entered here, the speed was set to 12 m/s.
KML: CarlsonT3.kml

Want the CAD Models and Drawings for this plane? This page has the details: SC-UAV
One area of multi-rotor UAV research that has been barely scratched is ground locomotion. The definition of ground locomotion is the use of systems built into the flight vehicle to move on the ground, likely without using the flight propulsive systems. Basically, this is what you get when you combine a UAV with a UGV. The following points illustrate the reasoning and need for such a system:
1) Electric Multi-rotor UAVs are only limited in flight duration by the battery capacity they carry. So, unless they exhibit some type of energy-harvesting behavior (mainly solar- or laser-powered flight), multi-rotor UAVs must land, usually sooner than later as compared to a fixed-wing UAV.
2) Although Multi-rotor UAVs are well suited to human-operated or human-assisted missions such as aerial photography, bridge inspection, and so on, there is little reason against, and many possibilities for, development of a completely autonomous system that does not require human supervision. This includes perimeter monitoring, migratory vehicles, scientific sampling, and other tasks. To create such a system, the vehicle must be able to autonomously recharge or exchange its batteries.
3) At present, most autonomous multi-rotor UAV research takes place in an indoor laboratory where researchers directly handle and maintain the test vehicle. Unless the research focus is the development of a recharging plate or platform for the test vehicle to land on to recharge (such as has been done at ETH Zurich), the autonomous system is only self-reliant in matters of flight and aerial maneuvering. Rendered another way: the machine must undergo the equivalent of a major surgical operation (preformed as the researcher removes and replaces the battery pack) in order to remain an active flying machine.
4) If the research topic is autonomous recharging, multicopters work great in an environment where a well-tuned motion-capture system and developed charging interface exists. However, as soon as autonomous multicopters venture outside of the lab into the outdoors, the well-defined and controlled environment disappears. Multi-rotors can exist in this type of environment just fine so long as attitude state information is known, but position information is somewhat reduced: The cues from a GPS and other navigation source can have a mean error of up to 2 meters, far to large for a precision landing on a charging pad.
5) A motion-capture system could be installed at the critical area of a landing pad or recharging dock/station to forward accurate position and state data to the vehicle. A multi-rotor could use GPS to arrive in the vicinity of the target area, to have the motion-capture system pickup the reflective patterns on the UAV, thus accomplishing the same precise interface as in the lab. Conversely, the UAV can have the vision-systems/devices necessary to use cues from defined targets on the landing dock.
6) For both versions of the solution posited in Point 5, there is still a large degree of complexity. Either the UAV must communicate with the ground station motion-capture systems, or the UAV must be able to identify specific marks on the charging platform. This ignores the other complex tasks involved in the scenario such as identifying if a station is already occupied by another quad/multi-rotor, and the possibility for unusual lighting and optical difficulties that might make vision-based landing difficult.
7) The alternate solution introduced here: At the cost of about 40 to 60 grams, a pair of continuous-rotation servos with wheels can be mounted to the underside of the quadrotor. Instead of negotiating with a motion-capture data link or processing data from a computer vision system to make a perfect landing on the charging pad, the entire flight vehicle can make a landing using GPS to within a flat 3 to 5 meter square target area. On the ground, the vehicle can drive directly to a empty charging dock using methods that have long existed for UGVs, such as line-following or lighthouse type arrangements. The control problem is simplified in that no motion capture system needs to exist, and the design of the landing area can be simplified or done away so long as the vehicle can drive in the landing area unhindered and locate a charger readily.
8) The utility of a ground locomotion system is much more useful to a multicopter than for just charging: Positioning on the top of a building for a better camera shot, handling the logistics of entering and exiting structures and areas that subdue flight devices, and accomplishing movement in general without using the flight devices are just a few examples.
Bibliography and Related Work:
VTOL Air/Ground Design: http://diydrones.com/profiles/blogs/transformer-bot-turns-from
ETH Zurich Recharging Pads: http://youtu.be/pcgvWhu8Arc (Seen from beginning and 0:25)
Attempts to have a multi-copter land on a UGV: https://www.youtube.com/watch?v=XpUdW_U2KJ8
Ground-based recharging: Seen in all commercial household cleaning robots such as the iRobot and Neato.
In between school and work tonight, I decided to try out the Google Earth flight simulator mode. It looks like the joystick issue I remember it as always having has been fixed in the most recent version, or at least, for the Saitek Cyborg Evo series.
I decided to try modifying the .acf file that configures the "aircraft". This file is located in (Root Programs Folder)\Google\Google Earth\client\res\flightsim\aircraft . I modified the F-16 file to approximate the flight dynamics I usually get when doing my FPV flying wing.
Probably not too useful for autonomous UAV research, but it provides a fair approximation of what flying from the front seat is like without having to actually go flying FPV. Fun for practicing for FPV as well.
The file I modified is this: f16.acf
Just replace the current existing F-16 file of the same name in the folder path mentioned above.
Made it! Successful 2km Range Test from Stephen Carlson on Vimeo.
Now that I've completed this major milestone in my research project, I'm switching gears. I've ordered the ArduPilot with the goal of autonomous flight by the end of August, in addition to achieving other, more classified goals.