RC Electric Calculator App for Android - version 3.0 is coming out shortly with many improvements and some calculations specifically for multirotors/copters! (Free update of course if you have already bought v2.x)
RC Electric Calculator App for Android - version 3.0 is coming out shortly with many improvements and some calculations specifically for multirotors/copters! (Free update of course if you have already bought v2.x)
It's basically an 8-in-1 calculator for electric powered model airplanes, helicopters, multicopters, cars, trucks and buggy's, if fact anything that uses rechargeable* batteries. (*As long as the voltage is known then any rechargeable battery including LiPo, LiFe, NiCd and NiMh batteries can be used for some calculations). US imperial units and metric units are also catered for!
One of the units used for the calculations in the app is the mAh (mill-amp-hours). All batteries have a mAh or Ah rating, this is the capacity of the battery or how much energy is stored. After you've recharged the battery your digital charger will show you how many mAh has been put back into the pack i.e. how much was used. This number is used to calculate a number of things in the app, like expected flight time using 80% of the pack or the average current used during the flight or run.
A use for this app is to calculate the average current draw of a multicopter in a hover and then from this calculate the expected flight time. (I flew with ArduPlane for 29 minutes from 2300mAh and the app calculated the average current draw as 4.6 Amps, or 1.6C and 77% of the 3000mAh pack!)
Link:
 RC E-calc Pro - only $1.99
RC E-calc Pro - only $1.99
As from v2.0 all the calculations are made "on-the-fly" so no buttons need to be tapped, just input your values and the calculations will be made when enough data is available.
The images should be self explanatory as to how it all works but feel free to ask any questions.
Use RC E-Calc Pro to calculate the following:
- Average Current Used by the aircraft during a flight/run.
- Average Discharge Rate (C-rate) of the LiPo battery during a flight.
- Expected Flight Time using 100% capacity of a battery.
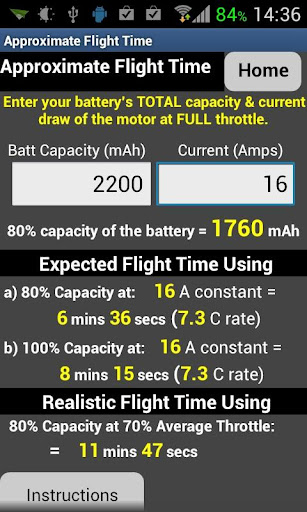
- Expected Flight Time using 80% capacity of a battery.
- Realistic Flight Time using 80% capacity of a battery and 70% average throttle.
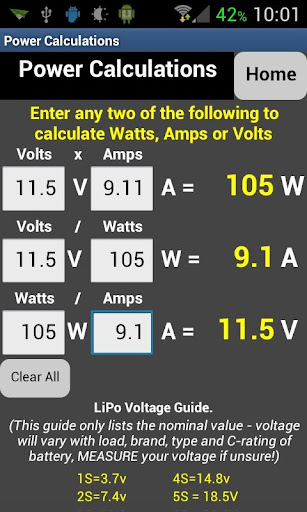
- Power in Watts from Volts & Amps.
- Volts from Power & Amps.
- Current in Amps from Power & Volts.
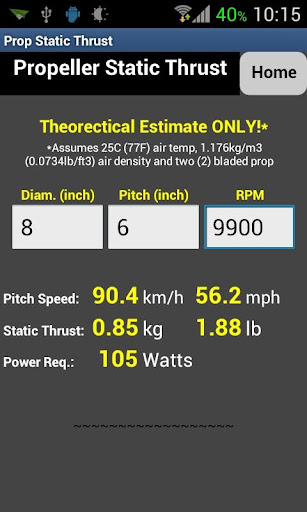
- Static thrust of a propeller in pounds or kilograms.
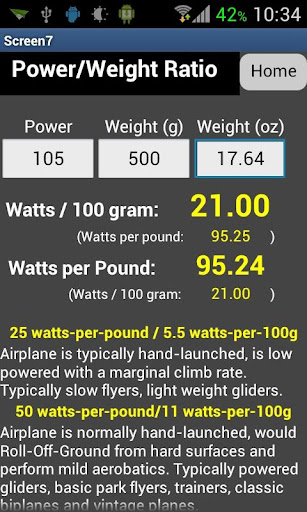
- Power to Weight Ratio in Watts-per-pound or Watts-per-100gram.
Examples:
a) Fly (or drive) for 11 minutes and 20 seconds, then recharge your 2200mAh LiPo, when finished your charger states that 1720mAh was returned to the battery. This app will then calculate that the average current draw for the flight was 9.11 amps, the discharge rate was 4.1C and you used 78% of the rated capacity of the battery. (Img #1)
b) How long can you fly your plane safely? It is recommended to fly using only 80% of the capacity of LiPo batteries to maximize their longevity so using the 9.11A average from the example above, the full throttle current draw (you will need to measure this) is 16A, input 2200mAh and 16A into the app and it'll calculate that you should be able to fly (at FULL throttle) for 6 minutes 36 seconds until the battery is 80% depleted or for 8 minutes 15 seconds (also at FULL throttle) until it is 100% depleted. (Img #2)
A "Realistic" flight time for a plane is also calculated which works out to be 11 minutes and 47 seconds using 80% capacity and 70% average throttle, very close to the actual flight time in the first example.
For helicopters and multicopters the flight time is very dependant on what style of flight, but you can use this calulator's section to calculate the expected flight time in a hover.
Future plans: Add wing loading, cubic wing loading calculator, (suggestions?)
Disclaimer: The formulas used in these calculations come from various internet sources, with some variations added from my own experience. Your results may vary! While a lot of effort was put into ensuring accuracy, this app is not intended to be professionally accurate.
Comments & suggestions very welcome.
thanks,
Graham
P.S. Sorry it's not on iOS.