I have successfully tested the Cheerson CX-20 Auto-Pathfinder (also called the Quanum NOVA). This quadcopter uses an APM v2.52 with the ArduCopter v3.1.2 already installed. It fly very well and all the Arducopter features are working very well....
Above, a video during the maiden flight of the CX-20 has been taken with a GoPro 3 "Black Edition" mounted on the anti-jello mounting base.
Test conditions: Wind 22 Km/h gusting 33 Km/h
The APM 2.5.2 (with an external magnetometer) with the Arducopter v3.1.2 handle very well the CX-20, the flight is very stable in loiter mode in spite of the strong gusts.
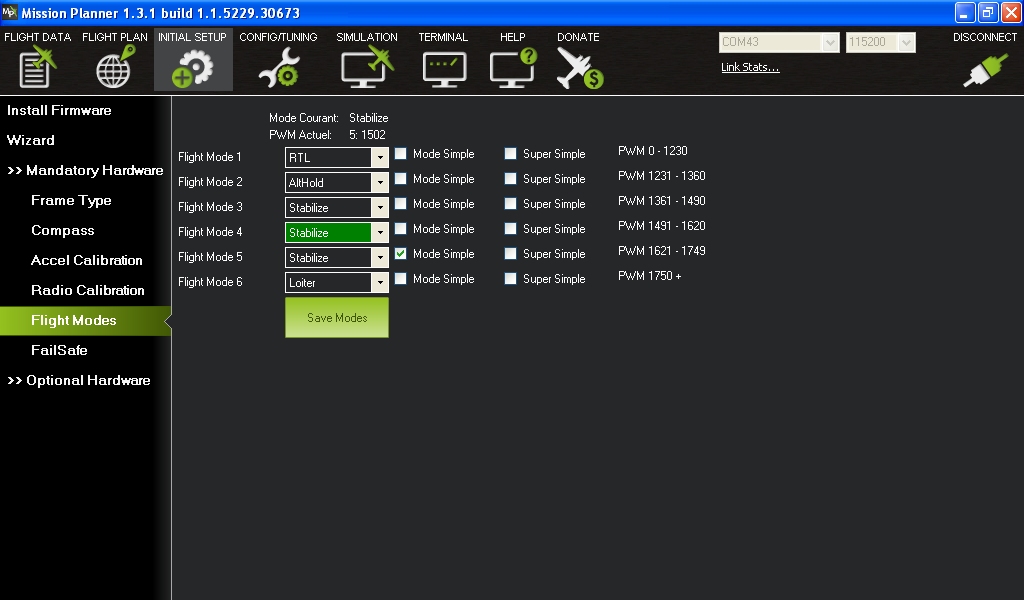
Below the factory PID installed:
The flight modes set by default:
I have added a telemetry datalink and tested sucessfully the Droid Planner v2.0 (Android) and the Mission Planner (PC).
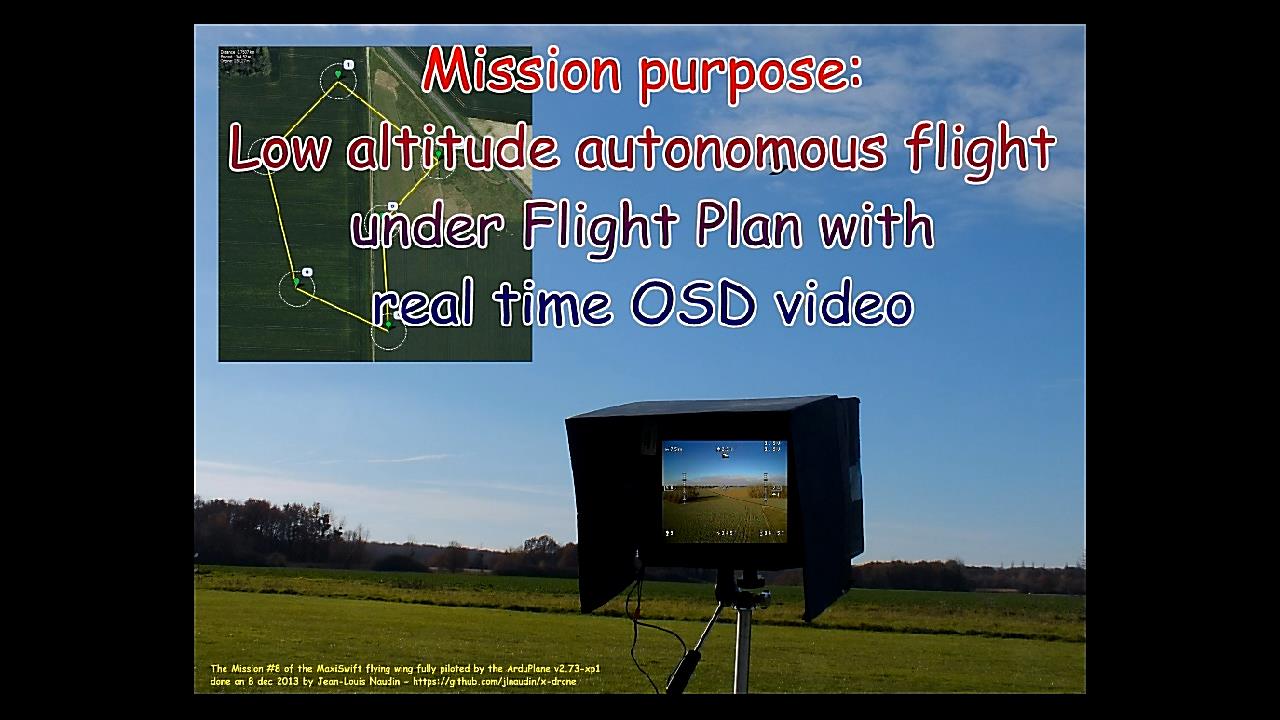
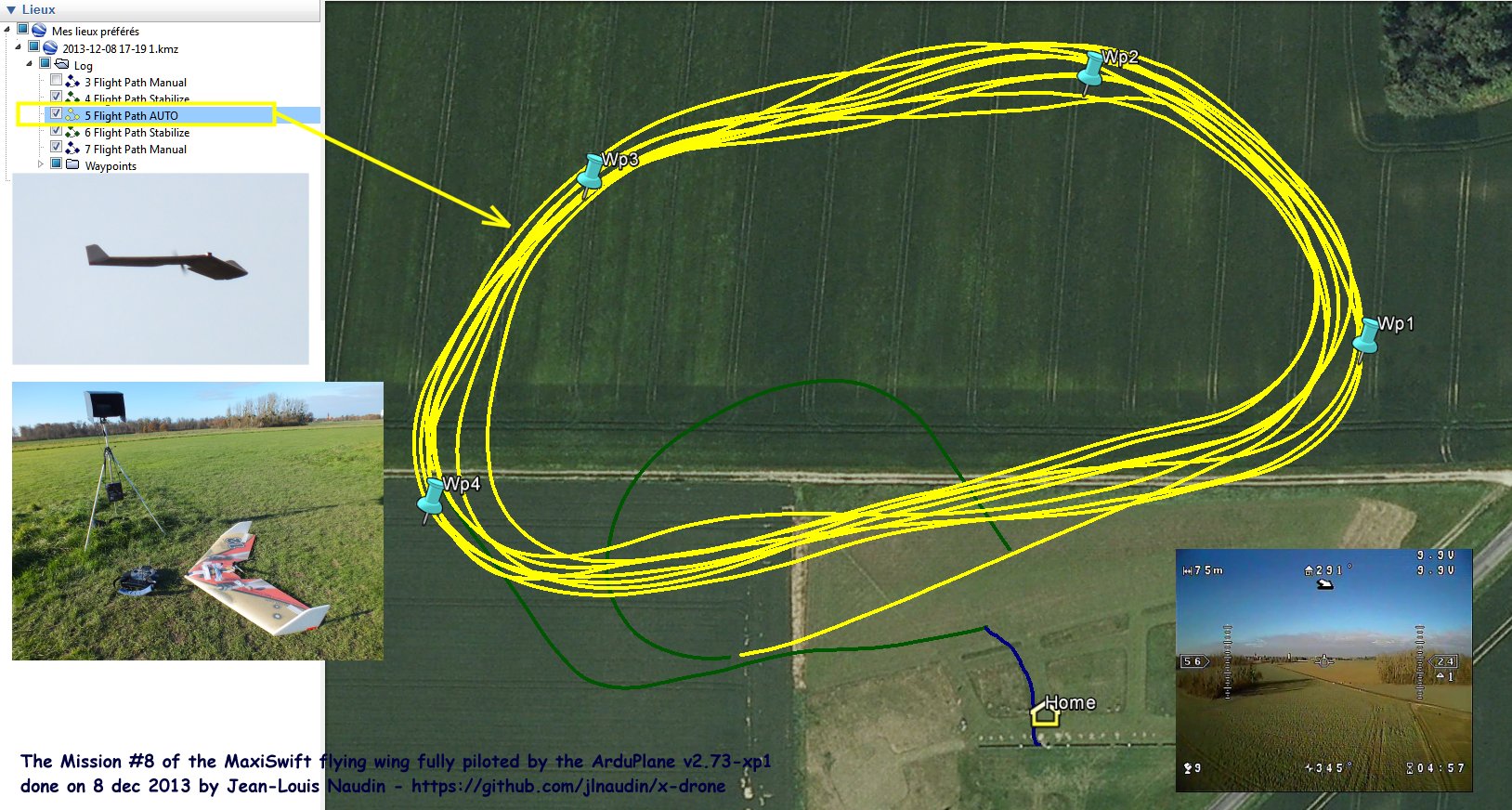
The MaxiSwift flying wing has donne successfully a low altitude flight autonomous mission (< 30m AGL) under flight plan piloted by the ArduPlane v2.73-xp1. A color camera onboard with an OSD display in real time the video of the flight and the data on the ground station screen. (Wind 7 km/h, gusting 15 km/h)
- Avionic setup: - ArduFlyer v2.5.2 (RCtimer) - firmware ARduPlane v2.73-xp1 (JLN version) - GPS: Crius CN-06 V2 (Ublox NEO6M) updated by JLN - Airspeed sensor MXV7002DP - OSD Rembizi - 5.8 Ghz Video transmitter - CCD color camera for FVP - Receiver: Multiplex RX-7 M-link - Transmitter: Multiplex Royal EVO9 M-link 2.4 Ghz - Lipo 3S 2650 mAh Turnigy - Brushless motors Spitz 15 #85570/200 Watts 1130KV - propeller 10x7 APC-E - ESC 40A for the motor - Take Off Weight (TOW): 1240 g - Flight time: about 15 min
Here a video of a Calmato Alpha 40, an electric powered airplane, fully piloted by the ArduPlane v2.73-xp1 and tested successfully in flight and in HIL (Hardware In the Loop) simulation on the x-Plane v9.70 simulator. Flying setup: - Calmato Alpha 40 (Kyosho) EP - xPower 800 Watts brushless motor (Kv670) - propeller 10x6 APC-E - Lipo batterie 5S 5000mAh Turnigy for the propulsion - ArduFlyer v2.5.2 IMU board (an APM v2.5 clone) - firmware ArduPlane v2.73-xp1 (enhanced by JLN) - GPS Crius CN-06 V2 - Airspeed sensor MVXP 7002DP - Lipo 3S 2200 mAh for the avionics - uBec 3A, 5V HIL simulation mode: - Xplane v9.70 - Mission Planner v1.2.86 - the Calmato Alpha 40 RC model for x-Plane by JLN - ArduFlyer v2.5.2 IMU board (an APM v2.5 clone) - firmware ArduPlane v2.73-xp1 (enhanced by JLN)
Here a video of an autonomous flight with a Maxi Swift flying wing fully piloted by the firmware ArduPlaneNG v2.x R5 with an All In One Pro (AIOP) full IMU board.This is a porting of the ArduPlane v2 (v2.4+v2.5) firmware and special addons and improvements for the AIOP board that I have added. The wind was 15 km/h gusting 22 km/h. The flight was very stable in spite of the gusty wind conditions.
Setup:
IMU board: All In One Pro (AIOP) v1.0 from CRIUS,
GPS: Crius CN-06 (Ublox NEO-6)
AirSpeed sensor: MPXV5004DP (from a old ardupilot one shield)
firmware ArduPlaneNG V2.x R5, porting of the ArduPlane v2 + special addons for the AIOP v1 IMU board by JLN
Flying Wing: Maxi Swift from MS Composite (1m40 wingspan)
brushless motor Spitz 30 850 kV, 360W with a propeller GWS 10x4.5
Here a video of a full autonomous test flight of my Easyglider e-Glider piloted by the firmware ArduPlaneNG v2.x R4 and an AIOP (All In One Pro) full IMU board.This is a porting of the official ArduPlane v2 firmware with special addons and improvements for the AIOP board that I have added. The flight was very stable in spite of the gusty wind conditions, the wind was blowing at 18 km/h gusting 35 km/h..
Here a video of a test flight of the ArduCopterNG v2.7 with the All In One Pro IMU board (AIOP). The official release of the ArduCopter v2.7 firmware for APM has been ported and tested successfully in flight on a quadcopter with an All In One Pro (AIOP) v1.0 full IMU on board by Jean-Louis Naudin on July 29, 2012.
[UPDATE: This project is now being ported to a proper Google Code repository and manual. For instructions, start there. You can also join the ArduRover User Group here.]
Hello to ALL, the new firmware for APMRover v2 has been tested successfully on my rover on may 1st, 2012 on full autonomous reco mission following a navigation plan. This new release of the APMRover v2 works on the APM v1.4 with the OilPan shield (magnetometer + MT3329 GPS) and also of course on the APM v2. The previous version of the APMRover v1.0 was a light size version specially designed for the APM1280 CPU (only) board and the MT3329 GPS.
For the frame, I have used a Traxxas Monster Jam Grinder with a brushed and high power motor Titan 12T and its XL-5 ESC.
The APMrover UGV is able to run itself following a list of recorded waypoints. The waypoints list (FPL) can be preloaded with the APM Mission Planner OR better in live, recorded by the pilot himself (with the SW7) during a manual run and then replayed in a full autonomous mission.
The firmware APMrover2 for APM v1 + OilPan or APM v2 successfully tested can be downloadedHERE
This is spring time and thus theThermoPilot project is still under intensive development (now the v6.x version) and real tests flights can be conducted because the thermal upwards can be hunted above the fields... Below a sample log flight during a full autonomous thermal hunting in free mode.
Here a flight log during a 23 km of full autonomous cross country soaring mission in closed loops with 5 waypoints.
An ArduPilot Mega 2560 is installed on the Cularis e-Glider with the ThermoPilot v6.x firmware (an enhanced version of the ArduPlane v2.33). The ThermoPilot v6.0 includes a lot of improvements for the cross country soaring and the thermal hunting and some dedicated ML algorithms to do a close following of the thermal upwards.
Below the Cularis e-Glider and its big brother, the Fashionista: a 5 meters wingspan e-Glider (a very good thermal hunter)...
During the summer and the spring 2012, the ThermoPilot project will be very active in the air... Stay tuned...
Here some videos samples of 8 full AUTO-LANDING tests flights that I have done with the firwmare ArduCopter v2.4xp1 (JLN mod). I have updated the official ArduCopter v2.4 firmware with a special Auto-Landing mod that I have developped and tested successfully in the previous v2.2xp2 release.
In the video you will see, full tests of the: - STABILIZE mode (full manual flight evolutions), - LOITER mode (GPS position hold), - and 4 samples of FULL AUTO-LANDING with the v2.4xp1
The quadcopter is firstly set in LOITER mode and then the AUTO-LANDING is trigged by the Switch 7 of the transmitter. Setup: ArduPilot Mega v2 + Firmware ArduCopter v2.4xp1, Frame: Quadcopter DJI F450 Flame Wheel (X mode)
Here some videos samples of full AUTO-LANDING tests flights in HIL mode on AeroSIM-RC 3.83 with a Raptor 30 type helicopter (H1) done with the firwmare ArduCopter v2.4xp2 (JLN mod). The official v2.4 firmware has been updated with a special Auto-Landing mod which uses only the BARO sensor. Tested with an ArduPilot Mega v1.4 connected in HIL mode on AeroSIM-RC v3.83 through the APM Mission planner.
Here a video a the latest firmware of the ThermoPilot v5.2 (2012 version) which uses a new algorithm (MLA) tested in HIL mode on Xplane v9.70 during a full autonomous slope soaring flight in high mountains. The ThermoPilot is a full enhancement of the ArduPlane v2.28 which adds the Thermal Hunting capabilitie and some others features for the gliders pilots. The ThermoPilot v5.0 has been tested successfully in july-august 2011 on a Cularis electro-glider and on oct 2011 on a ASW-24 3m50 electro-glider with an ArduPilot Mega 2560 v1.4 IMU (phase 3). The phase 4, now uses an APM v2 with the v2.28ThP5 firmware. I am using Xplane v9.70 as a test plateform in HIL mode because, it is able to reproduce with accuracy various weather conditions (thermal upwards, dynamic soaring, slope and/or ridge soaring) in a real 3D mapped world...
The ThermoPilot is able to do a cross country soaring mission and it is also able to do a slope soaring pattern pointed by two GPS points. These two points are pointed in flight by the pilot along the slope and then the glider is able to flight itself as long as the dynamics upwards are still actives.
Here a video of the test of a Nimbus 4 meters wingspan electro-glider piloted by the firmware ArduPlane 2.28xp1 (updated version with a JLN mod). Test done in HIL mode with the AeroSIM-RC v3.83 simulator connected through the AP Mission planner v1.1.30 on an ArduPilot Mega board v1.
Test Mission profile:
Full AUTO TakeOff,
Exec of the flight plan (8 Waypoints),
Full AUTO Landing.
The original ArduPlane v2.28 firmware has been updated (xp1) with some improvements:
Tuning of the final slope for a smooth touchdown, tested with the Nimbus 4 on AeroSIM-RC 3.83 in HIL mode,
Auto calculation of the wp_radius Vs the ground_speed and the max turn angle in AUTO mode so as to get the best turning point at the Wp,
add the CLOSED_LOOP_NAV ENABLED switch to allow redoing the flight plan after the end of the exec,
add HIL mode test in GCS_Mavlink.pde for AeroSIM RC v3.83 (and also Xplane v9), the APMHill plugin tested with the Nimbus 4m electro-glider model,
the CLI switch can be disabled, this allows to use only a APM CPU board without a full IMU shield for HIL test.
This is a part of the project Thermopilot (a Thermal Hunter drone): The purpose is to build a full autonomous Thermal Hunter Glider which is able to fly for a long duration in an area defined by a radius, a ceiling and a minimal altitude. The glider uses thermal soaring and dynamic soaring methods commonly used by full scale gliders during cross country soaring competitions. The ThermoPilot has been tested successfuly in flight during the summer and spring 2011 on a Cularis and a ASW24 3.50m electro-glider (below). Lot of flights have been done in high mountains (slope/ridge soaring) and above the fields (thermal soaring).
The Thermopilot project will continue intensively during the spring 2012... Stay tuned...
Here a video of a long duration LOITER (GPS position Hold) with my QRO quadcopter piloted by the ArduMega v2 board and the firmware ArduCopter v2.2 B4xp1 (with JLN mod). The flight is very stable and secure.
Avionic setup: ArduPilot Mega v2, firmware Arducopter V2.2 B4xp1
Here a video about the HIL tests of the firmware ArduCopter v2.2 b2xp2 (with JLN updates) with an Helicopter in H1 mode (Raptor 30 type) on the AeroSIM-RC simulator.
The tested features are:
- STABILIZE mode, - LOITER mode (GPS position Hold), - RTL (Return To Launch), - AUTO mode (GPS autonomous navigation), - AUTO TAKE-OFF, - AUTO LANDING.
Tested with AeroSIM-RC v3.81 and an ArduMega 2560 (APM1) through the APM mission planner v1.1.20.
This is an alpha version of the firmware and only for explorers and testers....
Transmitter: Turnigy 9x, Receiver: Turnigy 9x8Cv2. Helicopter model simulation (type Raptor 30) with 1 roll servo, 1 pitch servo, 1 cyclic servo (type H1).
ArduCopter in action: Testing the QuadCopter (HIL mode) on X-Plane v9
Here a video a the ArduMega board (2560 or 1280) with the firmware ArduCopter v2.1.1b (JLN update for X-Plane) connected on the X-Plane simulator throught the APM Planner in HIL mode. The QuadCopter QRO has been modelized for X-Plane v9.0 (or greater) so as get a closest replication of a true QuadCopter UAV.
This is a very good method for testing all the features of the ArduCopter firmware. For conducting a such test, only an ArduMega board (APM1280, APM2560, APM2) is used, no IMU shield or sensor are required here...
Setup:
- Receiver: Turnigy 9X8C v2 connected to the APM board
- Transmitter: Turnigy 9x
- APM planner v1.1.1x
- ArduMega board (APM v1 or APM v2)
- firmware ArduCopter v2.x.x + the JLN mod for X-Plane
- Software: X-Plane v9 or greater
- QRO_X: the quadcopter model (by JLN) for X-Plane
Here a video of a full autonomous navigation in AUTO mode of the QRO (Quad Rotor Observer) with the firmware Arducopter v2.0.56a. The waypoints have been recorded in flight with the Switch on Ch7. Successful tests of modes: ALT_HOLD, LOITER, AUTO, WP_SAVE, STABLE, SIMPLE. The heading is locked with the help of a 3 axis magnetometer, the altitude is only locked by a barometric pressure (no sonar and no optical flow sensor).
Here a video of a new serie of tests of my quadcopter (QRO) during a full autonomous flight in RTL and LOITER mode (GPS position Hold) with the firmware Arducopter v2.0.54 + stability patch. The altitude is only locked by a barometric pressure (no sonar and no optical flow sensor).
The quadcopter autonomous flight is really stable and safe, the Jason' stability patch on the firmware arducopter v2.0.54 is a great improvement.
Wind: W-N-W at 13 km/h
Avionic setup: - Ardupilot Mega (Atmega 2560 @16 MHz), 32 Mips - Full 9DOF IMU, - Built-in 16 MB Data Logger, - Airspeed and absolute pressure sensors (Bosh), - triple axis magnetometer HMC5843, - 10Hz Mediatek GPS. - firmware Arducopter V2.0.54 (original version + stability patch)
I have done successful tests flights with the version of the ArduCopter v2.0.51 (original firmware version, not modified). I have used a hands build quadcopter frame (550 mm wide) . In spite of the windy and gusty weather (wind 18 Km/h gusting 22 Km/h), I have been very suprised by the stability of my quadcopter with this new firmware (thanks to Jason and to the DIY Drones team).
I have tested some features such as: STABILIZE, SIMPLE, LOITER, ALT HOLD. All these modes works very well after a fine tuning.
On october 1st, 2011, my MAJA drone has done successfully a full autonomous flight under flight plan with the ThermoPilot v5, an updated version of the Arduplane v2.23. The video of the flight is recorded with a GO pro HD wide on board. This test flight is a part of my ThermoPilot project (Autonomous Thermal Hunter glider).
The flight of the real MAJA drone is very similar to the simulated flights done with the Xplane simulator v9.7 using the modelized MAJA in HIL mode with the same hardware (APM2560) and firmware (ThermoPilot v5).
You will find below, a video of the simulated flight in HIL mode with X-Plane v9.7 with automatic take-off and landing:
This project has been started in october 2010 and its purpose is to build a full autonomous Thermal Hunter Glider which is able to fly for a long duration in an area defined by a radius, a ceiling and a minimal altitude. The glider uses thermal soaring and dynamic soaring methods commonly used by full scale gliders during cross country soaring competitions.
During a full autonomous flight defined by a flight plan, the glider is able to optimize itself the onboard power using the energy gained by the updrafts during its thermal hunting process. For safety reasons, the glider can use its electrical engine to sustain the minimal altitude required.In the video, you will see some samples of the test flights during the phase 2 of the Thermopilot project. The glider is fully stabilized by the Thermopilot software.
During the Phase 2 of the project, the firmware has been tested in flight with an ArduPilot/ArduIMU board (firmware ThermoPilot v2.9.x JLN version). The ThermoPilot (phase 3) will use an ArduPilot MEGA 2560 and a bigger glider. The setup has been successfully tested on the MAJA drone in May 2011. The ThermoPilot will be able to learn and optimize itself the thermal upwards areas during its thermal hunting...
The ThermoPilot firmware has been tested in High Mountains in July 2011 (Savoie, French Alps): Ridge Soaring tests flights done in high wind conditions. It has also been tested in the fields in August 2011 (Auvergne, France): Thermal Soaring tests flights in various weather conditions.