Finally an update for those of us who purchased our GoPro 3 cameras when they first came out. Patch should fix battery and WiFi issues. Update can be found HERE.
All Posts (14049)
Sort by
A really useful multirotor is big enough to carry a camera or FPV yet small enough to take with you everywhere. A quad or tri rotor can be made more compact by folding the arms but how about some legs that fold out of the way? As soon as I saw the Qube H-copter from Aerovironment, I knew I had my answer. I like the Qube's wire legs for several reasons:
- they fold flat
- they are strong & lightweight
- they have a very small cross-section to the wind
- they are reliable. There really isn't anything to break...bend maybe.
The Qube mounts folding wire legs to round arms using custom plastic collars. But I wanted to attach my wire legs to 1/2 inch square pine arms. The first two photos shows my solution. Two tie wraps hold each of two identical custom hinges to the wooden arm. No holes are drilled into the wooden arm itself so its structural integrity is not compromised. One hinge pivots a custom cross arm and the other hinge pivots the 5/32 inch diameter piano wire leg. The end of the legs have rubberized ball feet made from a bead of JB Weld surrounded by a 1/2 inch ball of OOGOO. You could also use Sugru.
You could make these legs a lot shorter. As it is, this tricopter will bounce like a ball on a hard landing. I have not broken any custom parts yet.
Where does the custom hinge and cross arm come from? From 3D printers at Shapeways.com. I drew both parts in the free version of Sketchup 8 in one night and spent another night preparing (debugging) the designs for 3D printers. The requirements for printing 3D objects are much more demanding than requirements for simply rendering a pretty picture. I used both MeshLab and NetFabb Studio. The Shapeways website has all the information you need to get and use free or open source 3D design software.
A single set of 2 hinges and one cross arm will cost you about $14 in materials at my Shapeways store. I offer the design for free - I do not know if it is protected by any patents.
The $14 is not bad for a precision prototype but too expensive to use on a regular basis. In my next post, I will show you how I made a silicon rubber mold from these 3D printed parts and knocked out strong epoxy parts for pennies.
Build log
The thing I like best about this tricopter is that it crashes into trees and falls out of the sky (a lot) but it rarely breaks anything more than a propeller (if that). I spend more time flying (aggressively) and less time repairing. I fly HD video cameras and FPV with it.
Frame laser cut by Ponoko from Improved RC Explorer pattern by colorex.
1/2 in. square pine arms, 10.5 in. long
3x 8045 slow fly propeller
OpenPilot 3DCC
I can't help but notice that allot of time in the discussions on DIY Drones is spent arguing. Clearly this saps the energy of this community. It is best never to get involved. That being said I think everyone who is active in any open source community (not just owners) should watch this video.
I know, I know... after months of being away, I'm finally getting an airplane back in the air with the APM. It flew great and the APM, as always, was awesome. I'll be using the Raptor for a while and will start doing longer range flights via telemetry. Its also allowing me to complete the Beginner to Expert videos I'm making for the APM.
I'm glad to be back!
-Trent
 Progress has been slow on my UxV Control Station project recently due to other obligations. However, I have decided to create an Arduino shield for that project to make it easier for interested people to recreate the UxV-CS. I'm not very experienced in hardware design, so things are going slow but steady.
Progress has been slow on my UxV Control Station project recently due to other obligations. However, I have decided to create an Arduino shield for that project to make it easier for interested people to recreate the UxV-CS. I'm not very experienced in hardware design, so things are going slow but steady.
I will not be selling any hardware but I will publish the design files under a CC license when ready.
Why a shield instead of a full custom PCB? That's pretty easy to answer - it's more flexible. The user can use a MEGA1280 or MEGA2560 or any pin-compatible clone. It's also more future-safe. My current design is just planned for 5V but with very little changes it could be made compatible e.g. with an Arduino DUE which has considerably more processing power.
From ABC News:
San Diego is joining forces with Tijuana to become the center of the burgeoning drone industry.
Business leaders hope that the already growing defense industry in the San Diego area, combined with the technical and manufacturing expertise in Baja California will attract business and make the region into the capital of the rapidly growing drone industry. Drones, also called unmanned aerial vehicles (UAV) are basically flying robots used primarily for military purposes but increasingly for commercial uses such as agriculture, infrastructure inspection, even archeology.
"The industry is projected to double in the next seven years and we see tremendous opportunities for the San Diego-Baja region," said Sean Barr of the San Diego Regional Economic Development Corporation.
Already more than 7,000 jobs in San Diego are dedicated to the unmanned vehicle industry, according to a report by the National University System Institute For Policy Research (NUSIPR). In 2011, $1.28 billion was spent in Southern California on drones – and analysts expect that to double by the end of the decade.
San Diego's defense industry has quadrupled in recent years. Following the September 11, 2001 terrorist attacks, the United States has increasing turned to drones for reconnaissence and attack missions. Defense spending in San Diego went from $2.8 billion in 2000 to $11.6 billion in 2010.
Even with expected cuts in defense spending, global demand for drones alone will reach $12 billion by 2019. Much of that growth is expected to come from commercial spending.
"We know the commercial potential is greater," Barr said in an interview.
Barr emphasized the broad land and maritime applications for the robotic technology. And under a recent law, the Federal Aviation Administration will open up airspace to commercial drones by 2015.
"Clearly these manufacturers are interested not only in unmanned vehicles for military use, but also in the civilian market," said Erik Bruvold, President of NUSIPR and co-author of its report. "They understand that's where there is growth potential."
He says business leaders are leveraging Baja's economic strengths to make it happen.
Tijuana is already a well-known manufacturing hub for the aerospace, automotive, electronic and medical industries.
"The development of a robust non-military marketplace is going to be an important part of the synergy between the two regions," Bruvold said.
See also: Jordi Muñoz, a 20-year-old at the Forefront of the Personal Drone Market
Jordi Muñoz, President of 3D Robotics, is already taking advantage of that synergy. The young Mexican entrepreneur, whose drone business caters to hobbyist and university researchers, has set up shop in San Diego, but has manufacturing take place in Tijuana. And nearly all of the engineers he's hired in San Diego to design and develop the technology are from Tijuana as well.
Representatives from Baja and Southern California will be jointly representing the region this summer at the Paris Air Show, a leading aerospace industry event, said Barr.
Technically, use over residential areas is already disallowed by the FAA and has been for decades, but some communities are hoping to take matters in their own hands.
From USA Today:
RANCHO MIRAGE, Calif. — City Council here is set to vote on a proposal Thursday to ban drones in residential areas, what could be the first law of its kind in California.
The proposed ordinance bans the flying of "unmanned aircraft that can fly under the control of a remote pilot or by a geographic positions system (GPS) guided autopilot mechanism" up to 400 feet above areas zoned residential. Anything flying higher is in Federal Aviation Administration jurisdiction.
A "drone permit" from the city would be required to make recordings of a single residence, along with written permission from the homeowner.
"Technically, people can use these things to tape people's homes and backyards and put it on YouTube," said Steve Quintanilla, city attorney in this Palm Springs, Calif., suburb of about 20,000.
Remote-controlled drones, capable of flying at low altitudes while equipped with cameras or even weapons, have raised fears of inescapable surveillance by law enforcement from civil liberties advocates. Some 30 states are considering laws curbing their use by authorities, generally by requiring them to first get a probable cause warrant.
In February in Charlottesville, Va., home of the University of Virginia, the council passed a resolution urging the state to limit the use of police spy drones but does not ban drones in the city's air space. St. Bonifaciuis, Minn., population 2,300, followed later in February with its version of an ordinance initiated by the Rutherford Institute civil-liberties group that also forbids operating a drone in the city except on an owner's land.
But the genesis of Rancho Mirage's proposal was a homeowner, annoyed at the buzz of his neighbor's hobby.
"It sounded like a weed-eater, or weed whacker, and I wondered, 'Who's out doing their landscaping on a Sunday afternoon?" said Steve Sonneville, who was trying to relax in his backyard about six weeks ago. "Then I heard it getting louder and louder, and I looked up and realized it was coming from overhead."
The airborne drone, held up by four rotors, was about 50 feet above him.
"It was slowly going back and forth over the backyard of my home," said the defense contractor who works out of the Marine Corps Air Ground Combat Center in Twentynine Palms, Calif. "I knew right away what it was and what was going on."
It took Sonneville a few minutes to find two men in the common area of his gated community piloting the drone remotely.
"I told them, 'I don't think you should be flying that in a subdivision, we have an expectation of privacy.' And they were very cooperative, and basically understood what I was trying to get at," Sonneville said.
The next day he emailed Rancho Mirage Mayor Scott Hines to voice his concerns.
Quintanilla said he never considered expanding the ban to cover the wider concerns. "Law enforcement is a whole different issue. This is an issue of privacy between neighbors."
“I think individuals should be able to use their own property and perhaps common areas of communities to enjoy the technology with their families. Where one crosses the line is by infringing on the privacy of others.”
— Scott Hines, mayor of Rancho Mirage, Calif.Quintanilla said nothing in current law can halt bold invasions of privacy or stop a sex offender from using a drone to search for prey.
Hines, whose family gave him a drone for his birthday last year, said he has played with his iPad-controlled drone in his backyard and taken it to Joshua Tree National Park.
He believes the current language in the draft ordinance might be a little too broad.
"I think individuals should be able to use their own property and perhaps common areas of communities to enjoy the technology with their families. Where one crosses the line is by infringing on the privacy of others," he said.
Councilwoman Iris Smotrich said she's never had a personal encounter with a drone but has read up on the new technology and favors passing tougher regulations as well as the exemption for law enforcement.
"I think law enforcement should be able to use whatever technology is available to them to enforce our laws and make our citizens safe," she said.
Sonneville said he hopes the council will consider adding protections against excessive law enforcement surveillance, not in the proposal now.
Peter Bibring, a senior staff attorney for the American Civil Liberties Union of Southern California, said he's not aware of any proposed or passed laws clamping down on non-law-enforcement use of drones statewide.
A bill has been introduced in the California Senate to clarify that drones do fall under existing invasion of privacy laws, he said.
Use of commercial drones for everything from package delivery to crop dusting is expected to explode once the FAA, which now bans them, comes up with regulations allowing them in, expected to happen by 2015.

In the past, we've seen a variety of robotic arms that can do a variety of things, from chucking cinder blocks across a room to being controlled by thought. But behind the majority of these mechanical feats was a human guiding the robot's every move, step-by-step. That might be fine inside a laboratory, but what about somewhere a little less convenient, like a war zone, for instance? That's why DARPA (the Defense Advanced Research Projects Agency) has begun development on autonomous robotic arms that require only simple commands to performs complex tasks, like searching a bag or defusing explosive devices.
Robots are increasingly used by the military as a means to keep soldiers out of harm's way, but each bot tends to have a highly specific set of functions due to programming limits. DARPA's Autonomous Robotic Manipulation (ARM) program hopes to create one or more types of bots that can perform multiple tasks when needed with very little human interaction.
As DARPA sees it, this would require two main components: a robotic limb that could adapt to a wide range of uses and software that guides that limb's movements on its own.
For the hardware, the program is mainly focused on developing a multi-fingered hand and arm with greater dexterity. The software designers hope to program a series of individual actions will allow a robot to manipulate various objects with quick commands, such as "open the door" or "screw in the bolt," without any detailed guidance. The program's final goal is a true (i.e. autonomous) robot that performs better on its own than with a human operator.
So far, DARPA states it has succeeded in building robots that can carry out tasks with one arm and hand, but researchers are still testing robots with two arms and hands for more complicated actions. It will especially be interesting to see if DARPA applies this technology to the arm-equipped UAV it demonstrated a few months ago, possibly resulting in a robot that can fly off on its own to wherever it's needed.
If the video below of ARM changing a tire is any indication though, there's still some work to be done before an autonomous robot will match the speed of a human.
Source: DARPA
Aibotix GmbH, maker of a new generation of vertical take-off and landing unmanned aerial vehicles (UAV), today announced automated landing features for its Aibotix X6 model. Autonomous landing is the latest addition to multi-sensor, intelligent guidance systems that make the X6 the safest and easiest to operate commercial UAV.
The X6 has been recognized as the only UAV that is practical for application professionals to operate by themselves. Photographers, surveyors, engineers, maintenance inspectors, and public safety officials can safely maneuver equipment without the distraction of directing pilots where to fly. With automated landing, the Aibotix X6 sets new standards for completely intuitive operation. “Take-offs and landings are the times most prone to accidents when flying remote-controlled craft,” says Joerg Lamprecht, managing director of Aibotix. “With fully automatic landing, completing a round-trip mission with the X6 is simple. Piloting is easy for people with no prior experience flying model aircraft,” he added.
Dr. Friedhelm Michael of Aibotix customer Dr. Michael GEOMATICS explains, “Our expertise is in geographic information systems. Now, with auto landing, we are confident that surveyors can control the X6 directly for the entire assignment. X6 auto landing enables us to work faster and more accurately, which means we not only save on operating cost, but also do a better job for the customer.”
Auto landing is available now and is included in the Aibotix X6 at standard pricing. Payload and performance specifications are unchanged with auto landing, and it is compatible Aibotix X6 camera suspensions for still and video cameras. More information is available at the Aibotix Webpage.
About Aibotix GmbH
The name Aibotix is emblematic of the company’s two core technologies (AI from artificial intelligence and BOTIX from robotics). Founded in 2010, Aibotix develops and produces high-quality, intelligent flying machines that are particularly easy to operate due to their high degree of automation. Various cameras and sensors are available for particular tasks, especially those where human-piloted craft entail high risk and expense, such as aerial industrial inspection of wind turbines or outdoor cables.
Aibotix was founded by a team of experienced entrepreneurs who have worked intensively on advanced image processing, sensor technology and robotics for many years. Aibotix is represented in 14 countries and provides quality support and service worldwide. Sound financials and strong growth potential make Aibotix attractive to investors. Aibotix GmbH employs 28 people, and is headquartered in Kassel, Germany.
and I'll take any twist. :)))
Remember me? I'm still here!
Began sheeting Primus III fuse...


Hey everyone, I'm excited to announce a new group on meetup.com:
Minnesota Autonomous Vehicle Club
The focus of the group will be fielding an entry in SparkFun AVC. We will host build sessions, ground school, and flight testing events in the lead-up to AVC. The group will also have a focus of promoting and enabling safe and law-abiding personal drone operation in the Twin Cities area.
Our first meetup will be Thursday April 18 at 7:00 pm at the Hack Factory in Minneapolis. I will be presenting some general information on personal drone operation, details on SparkFun AVC, and an overview of the Fighting Walrus Radio project (shameless product plug!)
Hope you see you there!
Here's a relatively good summary of the privacy issues raised in the recent Alameda County (Oakland, CA) public protection committee meeting where the issue of a drone purchase was discussed.
For a long time, drones - unmanned aircraft - were used only by the military. Now local law enforcement wants them for police work such as surveillance and search-and-rescue missions. That in turn has sparked a fierce debate over the balance between cutting-edge law enforcement technology and the privacy rights of citizens.
In February, Reason TV covered an Alameda County, California public protection committee meeting in which Sheriff Gregory Ahern announced that he planned on using a laptop-sized drone (he prefers to call it an "unmanned aerial system") for search and rescue. “It’s mission specific to search areas for lost children or elderly or Alzheimer’s patients to search an area that it would be very difficult for our personnel to get to,” said Sheriff Ahern.
http://reason.com/reasontv/2013/04/04/cops-with-drones-technology-vs-privacy
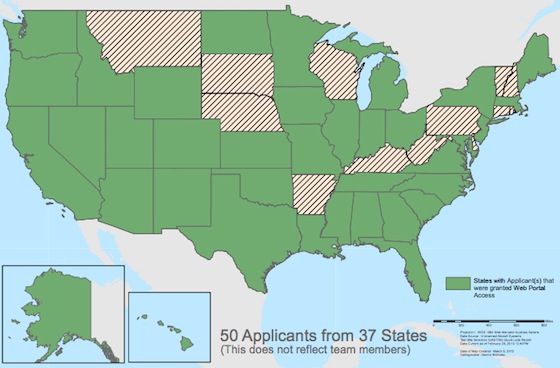
FAA map showing all the states where agencies have applied to be one of six drone test sites picked by end 2013.
Report on a FAA request for public comment on domestic UAV integration from The Verge:
Citizens sound off at FAA meeting Americans blast drone privacy policy in emotionally charged call for comments
When it comes to allowing drones to fly over US soil, Americans are of two minds: embrace domestic drones for such uses as crop dusting, high wire inspection, search and rescue, and border security, or run screaming and seek shelter from the surveillance state in the sky. Those dueling views were on display yesterday during a "public engagement session" hosted online by the US Federal Aviation Administration to gather input from citizens on the coming swarm.
IT QUICKLY DEVOLVED INTO A MASSIVE VENTING SESSIONThe two-hour long livestreamed conference call was open to any member of the US public to participate, providing citizens another opportunity to comment on the agency's newly proposed privacy policy on drones. But it quickly devolved into a massive venting session for and against the FAA's proposed drone privacy policy, and drones themselves. Many callers complained they couldn't even find the draft privacy policy document online.
For the record, the policy is located right here, although it is not readily apparent how to find this link from the FAA's main page. Perhaps the confusion is the agency's use of the moniker "unmanned aerial systems (UAS)," its preferred term for drones, also the one favored by drone industry lobbyists.
"WHAT YOU'RE DOING HERE IS A SHAM.""What you're doing here is a sham," said a woman from Prescott, Arizona, to the FAA, frustrated about being unable to locate the policy and what she deemed to be poor advance notice of the call. She said that if the FAA were serious about privacy, "you would not have placed tiny brief in our newspaper and devised this circuitous response scheme," later blasting the FAA's refusal to use the term "drone," to describe the aircraft. "A drone is a drone," she said.
Prescott is among the places around the country where local government officials havesubmitted applications to an FAA program to test commercial drones at six locations for a variety of uses, from police and agricultural surveillance to weather monitoring to firefighting. The FAA is aiming to finalize the sites by the end of the year, delaying the process by a year from its original timeline. In total, organizations from 37 states have applied, but the FAA hasn't released a list of all the applicants for the new sites. It has, however, published information online on a few of them thanks to Freedom of Information Act requests.
Another woman from a would-be drone test site near Brookesville, Florida, was concerned about potential drone crashes and surveillance in her "tight community." "Drones have crashed in other countries, and we're right in the middle of a populous area," she said, referring to military drones.
But the call brought out staunch drone proponents of these sites and of commercial drones, too. A self-identified lawyer from St. Louis, Missouri, made the (false) assertion that private drone ownership was protected under the US Constitution for the purposes of "self-defense."
"The right to deploy drones in your surrounds to protect yourself is a Constitutional right," the man said. "It will allow us to eliminate weapons of all other sorts." He also noted he was working on a "business model" for a commercial drone fleet that would fly over urban areas at night and monitor them for lights left on so the energy-inefficient buildings could be identified.
"[DRONES] WILL ALLOW US TO ELIMINATE WEAPONS OF ALL OTHER SORTS."A representative from the drone lobbying group the Association of Unmanned Vehicle Systems International (AUVSI) touted the economic benefits of drones and said "we do not believe the FAA should govern UAS based on privacy concerns."
The FAA didn't answer any questions and didn't participate much in the call at all, except for a brief opening statement by deputy Transportation Department secretary John Porcari. "This is designed to be a forum to allow the FAA to hear form the public on this approach," Porcari said. After that, the call moderators tried to maintain order by giving each caller three minutes to speak their peace, and asked for them to remain polite. Still, many callers vocally shamed one another and the agency itself.
The reason the FAA found itself in this position is due entirely to Congress. In a bill last year, lawmakers specifically mandated that the FAA figure out a way by 2015 to allow drones to fly safely through US airspace higher than 400 feet above ground, the ceiling for model aircraft. The FAA has granted about 1,000 waivers to local agencies to fly drones underneath this height since 2009, but only about 300 are active today. In order to get drones into US airspace at higher altitudes, the FAA first needs to understand how they will communicate with other aircraft, avoid violating people's privacy, and minimize risk to other piloted aircraft and those on the ground.
"[DRONES] MUST OPERATE IN ACCORDANCE WITH FEDERAL, STATE AND OTHER LAWS" ON PRIVACYThe test sites program is designed to do just that, and the current draft privacy policy is supposed to be part of the FAA's legally binding contract with selected test site operators. But as it stands right right now, the privacy policy reads fairly broadly, with only four major points, including such common sense regulations as that the test sites must "operate in accordance with federal, state and other laws regarding the protection of an individual's right to privacy," and that they must "ensure that there are privacy policies governing all activities," on their site.
"MY CONCERN IS ABOUT SAFETY ISSUES."Many of the callers questioned whether the FAA should be in charge of making privacy policies in the first place, a duty not spelled out in its official operating responsibilities. Instead, many callers — including many private pilots — said that the FAA should focus mainly on the safety issues posed by having drones of all sizes flying through airspace already crowded by manned aircraft.
As one pilot on the call put it: "my concern is about safety issues. How will they regulate or control safety around airports? We should be getting a flight briefing of any UAV activity in the area." The FAA will have to come up with answers to his and the other myriad questions about drones by the time it announces the first six test sites later this year, well before the swarm hits skies in 2015.
I started this project as an attempt to reduce the amount and cost of hardware required to control a UAV. Since many UAVs already have a radio modem as their telemetry link, I wanted to try piggybacking a control link over the radio modem instead of using a typical RC TX/RX combo.
My goals were to have a fully-featured remote control unit that is low cost and highly configurable. I wanted my system to be compatible with any flight controller that accepts a PPM sum as its input. This includes the MultiWii and Paparazzi controllers.
Since I don't have a lot of time on my hands at the moment, I am releasing my code in hopes that someone will be able to use my work in their own project.
Feature List
20 Hz update rate
<50ms latency
High quality PPM using hardware timer and output pin
Low bandwidth (22char/sec min, 440char/sec max for 8 servos + 12 buttons)
Efficient update system – changes to the joystick are sent up to 19 times per second, full update is sent once per second
Text file configuration of many features including: PPM characteristics, servo count, button count, I/O pins, navigation lights, voltage readings
Commlink passthrough for external devices via second UART (ATmega w/ two UARTs required)
Joypad rumble on signal degradation/loss
Hardware
For my setup I used a Playstation 2 controller w/ USB adapter, Xbee radio modems, and an ATMega328P based board. You can probably modify the project to use a different radio modem or a different joystick input without too much trouble.
Here is a diagram of my test circuit:
I've also uploaded the original Eagle files to the code.google.com repository that houses the project.
My basic setup is: a PS2 controller w/ USB adapter (from eBay), this is connected to the Ground Control Station which is running Linux. I use a USB to TTL adapter w/ 3.3V output to connect to and power the GCS Xbee.
On the UAV I have the circuit from the diagram above. The PPM output is connected to the PPM SUM input for MultiWii, or any other compatible flight controller.
PPM via the ATMega Hardware Timer and Output Pin
The PPM signal is generated using the Hardware Timer and Output Pin. Many PPM examples that I came across did not use the Fast PWM feature, instead setting the output pin to high or low inside the ISR, and I think there is room for improvement on this. Using Fast PWM allows you to shorten your ISR function and reduce the number of instructions per interrupt.
I used an array to store the PPM pulse lengths. The array is (Servo Count * 2) + 1 in length and stores the length of each servo pulse and all sync pulses. For example, if we have 8 servos that are all in neutral position, a minimum pulse of 1ms, a maximum pulse of 2ms, a high pulse of 200usec, and a sync pulse of 3ms our array would contain:
1500, 200, 1500, 200, 1500, 200, 1500, 200, 1500, 200, 1500, 200, 1500, 200, 1500, 200, 3000
Our ISR is as follows:
ISR(TIMER1_COMPA_vect) {
OCR1A = ppmInfo.pulses[ppmInfo.currentPulse]; // Set OCR1A compare register to our next pulse
ppmInfo.currentPulse++; // Increment the pulse counter
if(ppmInfo.currentPulse >= configInfo.ppmPulses) { // If the pulse counter is too high reset it
ppmInfo.currentPulse = 0;
}
}
As you can see it simply sets the Compare Match counter to the next pulse length, then it increments the current pulse count until it becomes out of bounds, in which case it is reset to 0.
Fast PWM handles the pin state changes every time the interrupt occurs. One issue that I ran into was that because Fast PWM mode toggles the output pin state on every interrupt, and there is no way to set the initial state, it is possible for the PPM signal to become inverted. In order to avoid this I had to set the timer into CTC Mode w/ Output Pin High on match, then force a match using the TCCR1C register, then put the timer into Fast PWM mode and start the PPM signal up. This forces the pin into the correct state for the start of our PPM signal.
Setup/Configuration
encoder.rc – This file configures the PPM encoder board. It allows you to configure the PPM characteristics, output pins, voltage readings, and button to pin mappings.
Configuration fields:
Debug Pin, Status LED Pin, Navlight Pin – Output pins for Debug, Status, and Navlight lights.
RSSI Pin – Input pin for reading RSSI
Main Battery Pin, Comm Battery Pin, Video Battery Pin – ADC input pins for various batteries
Lost Message Threshold – Time (ms) without a command from the ground station before the PPM encoder assumes it has lost its signal
Heartbeat Interval – Frequency (ms) to send heartbeat to the ground station
Ping Interval – Frequency (ms) to send a ping request to the ground station
PPM Min Pulse, PPM Max Pulse, PPM High Pulse, PPM Sync Pulse – PPM characteristics
Status Interval Signal Lost – Toggle interval for status LED if signal is lost
Status Interval OK – Toggle interval for status LED if signal is OK
Navlight Interval – How frequently to toggle navigation lights
Servo Count, Button Count – Servo and Button counts
Button Pin Map – Map for buttons to output pins (pushing a button drives the pin high)
ADC Sample Rate – Sample rate for the ADC
Voltage Samples – Number of battery voltage samples to average before transmitting to ground station
js_ctrl.rc – This file configures the radio modem port, joystick, and event device files. It also allows you to configure a throttle safety, button state count, and heartbeat interval.
XBee Port File, Joystick Port File, Joystick Event File – Devices files for the Xbee, joystick, and rumble event.
Joystick Discard Threshold – Inputs to the joystick below this threshold will be ignored. For example, the joystick I used (PS2) reads values from -32767 to 32767, with 0 being neutral. 32767 is quite a lot of steps for how little distance the joysticks physically move, meaning it is very easy to create a lot of input in the lower ranges unintentionally just by resting your thumbs on the joysticks. We don't want to transmit these types of unintentional movements.
PPM Interval – Frequency (ms) of an entire PPM frame (used to determine when to send full control updates)
Timeout Threshold – Time (ms) without a heartbeat from the airframe before the signal is considered lost
Button State Count – Count of how many states each button has, 0 means the button updates on press/release. 1 means the button is a toggle – press once to turn it on, press again to release.
Context Button – Allows a button to toggle a separate joystick context, wherein the joystick axis to servo mapping changes. This allows you to, for example, hit a button and have your pitch/roll remap to a camera pan/tilt.
Heartbeat Interval – Frequency (ms) to send a heartbeat
Ping Interval – Frequency (ms) to send a ping request
Servo Count, Button Count – # of servos and buttons
Throttle Safety – Time (in seconds) for throttle safety to remain on after program starts
To Do
RSSI reading method needs overhaul
Configuration of individual PPM channels min/max length (trim)
Fix servo count configuration
Allow editing of configuration via menus
Allow mapping of joystick axes to servos via menus
Better user interface
Ground control module
(April 4th, 2011 - April 4th, 2013)^^^
***Special Announcement***
April is Safety Month on Diydrones.com to check out how you can help (Click Here!)
As is customary and traditional, we celebrate every new 1,000 members here and share the traffic stats. This time it's 37,000!
There were almost 2.1 million page views this month! (we get around 70,000 page views a day on average). It took us just 20 days to get this latest 1,000 members--we're averaging one new member every 30 minutes.
Thanks as always to all the community members who make this growth possible, and especially the moderators who approve membership applications and blog posts and otherwise answer questions and keep things ticking here.
(Over 700,000 Visits to the Site in the last Month)
HOW TO: Simply opened her up, unplugged the naza and wires, installed APM, soldered tiny 3A uBEC onto the phantom's pcb for power for the APM, used the phantom's PPM receiver directly into the APM (with a small mod in the phantom's radio to get a switch on channel 5, not 6 as it is) ripped out the phantom's gps, installed our uBlox, connected motors as is and did the AC setup, took maybe 45min in total. She flies much better now
In this video, I go over how to trigger a Canon s95 camera through an rc transmitter, without taping a servo on top to push the shutter button. Canon cameras use a firmware hack called CHDK that allows shutter control through the usb port. With a simple switch from Turnigy, we can trigger the camera from the transmitter.
Turnigy switch: http://hobbyking.com/hobbyking/store/__8833__Turnigy_Receiver_Controlled_Switch_.html
Canon CHDK download and info: http://chdk.wikia.com/wiki/CHDK
Here’s a really quick video which takes a different approach to understanding the Fourier Series than we’re used to. If you’re a regular reader we’re sure you’ve heard of the Fourier Series (often discussed as FFT or Fast Fourier Transform), but there’s a good chance you know little about it. The series allows you to break down complex signals (think audio waves) into combinations of simple sine or cosine equations which can be handled by a microcontroller.
We’ve had that base level of understanding for a long time. But when you start to dig deeper we find that it becomes a math exercise that isn’t all that intuitive. The video clip embedded after the break changes that. It starts off by showing a rotating vector. Mapping the tip of that vector horizontally will draw the waveform. The Fourier Series is then leveraged, adding spinning vectors for the harmonics to the tip of the last vector. The result of summing these harmonics produces the sine-based square wave approximation seen above.
That’s a mouthful, and we’re sure you’ll agree that the video demo is much easier to understand. But the three minute clip just scratches the surface. If you’re determined to master the Fourier Series give this mammoth Stanford lecture series on the topic a try.
Technology has advanced markedly since the dawn of the silicon age, but our portable gadgets and gizmos are still largely held back by the limitations of their power source. Scientists at the Fraunhofer Institute for Material and Beam Technology IWS in Dresden report progress in this regard, with the development of a new longer-lasting lithium-sulfur battery that has the potential to outperform lithium-ion batteries, at a lower cost.
Though more powerful and less expensive to produce than the more widely used lithium-ion batteries, lithium-sulfur batteries have typically sported a comparatively poor lifespan. However, the Dresden-based researchers have successfully developed a new design that increases the charge cycles of lithium-sulfur batteries by a factor of seven.
“During previous tests, the batteries scarcely crossed the 200-cycle mark,” said Dr. Holger Althues, head of the Chemical Surface Technology group at IWS. "By means of a special combination of anode and cathode material, we have now managed to extend the lifespan of lithium-sulfur button cells to 1,400 cycles."
The anode is made from a silicon-carbon compound instead of the metallic lithium usually used, offering improved stability as a result – a key factor in the performance and lifespan of a battery. The cathode, meanwhile, is composed of elemental sulfur, and as such is cheaper to produce than the cobalt cathodes typically implemented.
Looking ahead to the future, the IWS researchers expect to refine the lithium-sulfur batteries to the point where they reach an energy density of up to 600 watt-hours/kilogram (Wh/kg). This would beat the lithium-ion density record of 400 Wh/kg claimed last year by Envia, and more than double that of Li-ion batteries currently in use.
Beyond potential application in electric cars, the Fraunhofer researchers cite smartphones as an attractive candidate for lighter, cheaper and more powerful lithium-sulfur battery technology, and presumably most other portable electronic devices, too.
"Lithium-sulfur technology might even make electric flying a realistic possibility,” said Althues. “Although such progress is still a long way off.”
Source: Fraunhofer
Hi,
For the past year I have been engineering my own autopilot shield for the Arduino Mega(and unintentionally the Due). I hope to be finished by the time AVC rolls around, but I have run into an issue. I currently an using 3 separate Arduinos(Mega: autopilot, ArduIMU, and Atmega328: fail safe) and I am having trouble communicating with them efficiently. Currently I have the Mega just waiting for a start data signal(at the beginning of a steam of data. Ex. "###") from the fail safe or ArduIMU, and then it decodes the data string following the start signal. But sometimes it can take upwards of 130ms per system to receive one string of data(because its waiting for the start signal. not because of excess data). 130ms for ArduIMU and 130ms for Fail safe. This isn't fast enough. The problem is that I am waiting for the two arduinos(Ex. arduIMU and mega) to be in sync but that doesn't happen very often. I have thought about using interrupts, but then I was afraid of interrupting crucial sections of the code. I have looked into MAVlink protocol because, If I understand it correctly, the heartbeat that it sends out is used for synchronization between devices?
I was hoping someone could point me in a direction that would help me synchronize communications in a way that does not involve a lot of waiting.
Thanks in advance!
Daniel
If you are interested in reading more about the project, I have a blog.(Way out of Date and no pictures yet)
(Sorry for posting on the main page, I didn't see a suitable place in the forums)