All Posts (14054)
Sort by


OLD FM TX
New UHF TXDon't have to think about channel or "range" anymore.With a Yagi antenna and the new tracking antenna from immersion I hope to get a good range. My goel is about 15-20 km.(Did I mention the 7W booster I also ordered from Thomas Scherrer shhhhh).I'll gess the video link will be the week point now.More will come about this new option.
- A soldering iron and solder
- A FTDI cable (DIY Drones cable recommended) to program the board.
- Helium (Available in the balloon kits available for $18 at Target, or a larger tank from Amazon)
- A 7.4v LiPo battery (any other one of that approximate size and capacity will do, as long as it's under about 35-40 grams)
- A balancing charger (This one, with this power supply, will do the trick and is inexpensvie)
- If you want to use RC mode, you'll need an RC system with at least three channels. Any will work, starting with simple systems such as this one. You''ll also need two female-to-female RC cables.
- A 9v battery for the ground beacon
- Double-stick tape to attach the board to the gondola
- Velcro tape to attach the gondola to the envelope
- Superglue
First, you need to download and install the latest Arduino IDE.
Then, download the latest Blimpduino code from the code repository.
Unzip the file. You should have a directory that looks like this:
Now plug in your FTDI cable into the six-pin FTDI port on the Blimpduino board. Make sure the BCK and GRN labels on the board correspond to the matching black and green labels or wires on your FTDI cable.
If you're using the Sparkfun FTDI board (it requires a USB cable, if you don't already have one), it will look like this:
If you're using the DIY Drones FTDI cable, it will look like this:
To load this code, power on the Blimpduino board with the battery or using some other 5v power source (do not attempt to just power the board with the FTDI cable. We did not connect the power pins on the FTDI port to the processor to avoid power conflict when the board is powered by the Rx and you're using the FTDI as a serial monitor). The red power LED should go on.
Then in the Arduino software in the "Tools" menu make sure you've selected the right serial port (the FTDI cable will create a new one, which is probably port 5 or higher). Also ensure that the board selected is "Arduino Pro or Pro Mini (8 Mhz)"
Load the BlimpDuino "sketchfile", blimpduino[version].pde, which will load the rest of files in tabs.
Your interface should look like this:
Now press the "Upload to I/O board" icon (the little arrow pointing to the right). If you have the Sparkfun board, after about 20 seconds you should see a red LED flash a few times and then stay on for a while as the code is being uploaded. On the DIY Drones cable, which doesn't have a LED, just wait. After about 30 seconds the software should report that the sketch was successfully uploaded by reporting "Done uploading" and reporting the Sketch size. If not, check out the Arduino debugging tips here.
Note: the Arduino IDE has a handy built-in serial monitor, which is a great way to watch Blimpduino work. The code reports a lot of status messages over serial, which you can see while your FTDI cable is plugged in. Just click on the little box icon on the far right and ensure that the baud rate is set for 38400, as shown:

www.engadget.com/media/2009/05/invensensememsgyromotion6-axis.jpg"/>
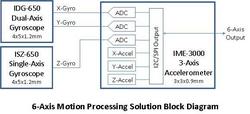 Press Release"The world's first 6-axis MEMS-based motion processing solution delivering the smallest, most robust inertial measurement unit (IMU) for CE applications. This solution includes two 4x5x1.2 mm packages for the gyroscopes and one 3x3x0.9 mm package for the accelerometer, providing a small 7x7mm equivalent footprint with 10,000 g-shock rating"Looks great! It says world's first, but i swear there was already an Analog Devices onearound , but very pricey... Anyway, I cant wait to see this in a RC plane. Good to see prices falling.I wonder if this was what was used in the IMUDot we saw earlier?
Press Release"The world's first 6-axis MEMS-based motion processing solution delivering the smallest, most robust inertial measurement unit (IMU) for CE applications. This solution includes two 4x5x1.2 mm packages for the gyroscopes and one 3x3x0.9 mm package for the accelerometer, providing a small 7x7mm equivalent footprint with 10,000 g-shock rating"Looks great! It says world's first, but i swear there was already an Analog Devices onearound , but very pricey... Anyway, I cant wait to see this in a RC plane. Good to see prices falling.I wonder if this was what was used in the IMUDot we saw earlier?